תחילת העבודה - PhotoRobot תמיכת משתמשים
אפליקציית PhotoRobot Controls (המכונה להלן “CAPP”) נועדה להפוך את תהליכי יצירת התוכן לאוטומטיים (תמונות, סרטונים, 360 ותלת מימד). מדריך זה מורכב מ-4 חלקים, שכל אחד מהם מייצג את התהליך.
- הגדרה - צור סביבת עבודה: מצלמות, חומרה ופרויקטים
- לכידה - שליטה PhotoRobot חומרה ומצלמות, לכידת תמונות ווידאו
- עריכה - תוכן חזותי לאחר תהליך
- פרסום - יצירת תמונות פלט בפורמטים מרובים, "ניהול פרופילים"
התקנת האפליקציה 'פקדי PhotoRobot'
כדי להתקין את אפליקציית PhotoRobot Controls במחשב שלך, היכנס לחשבון PhotoRobot שלך ועבור אל הורדות PhotoRobot.
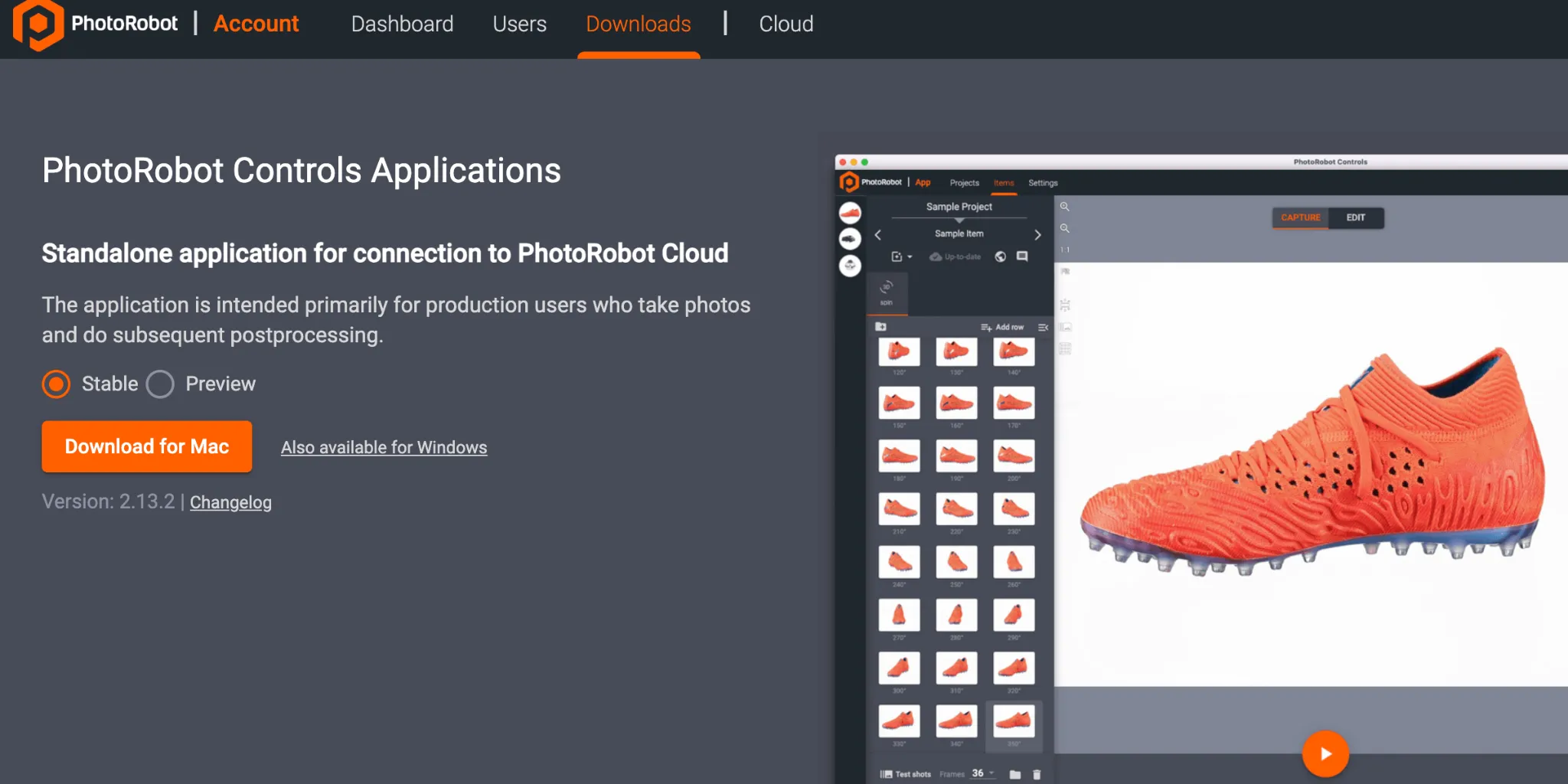
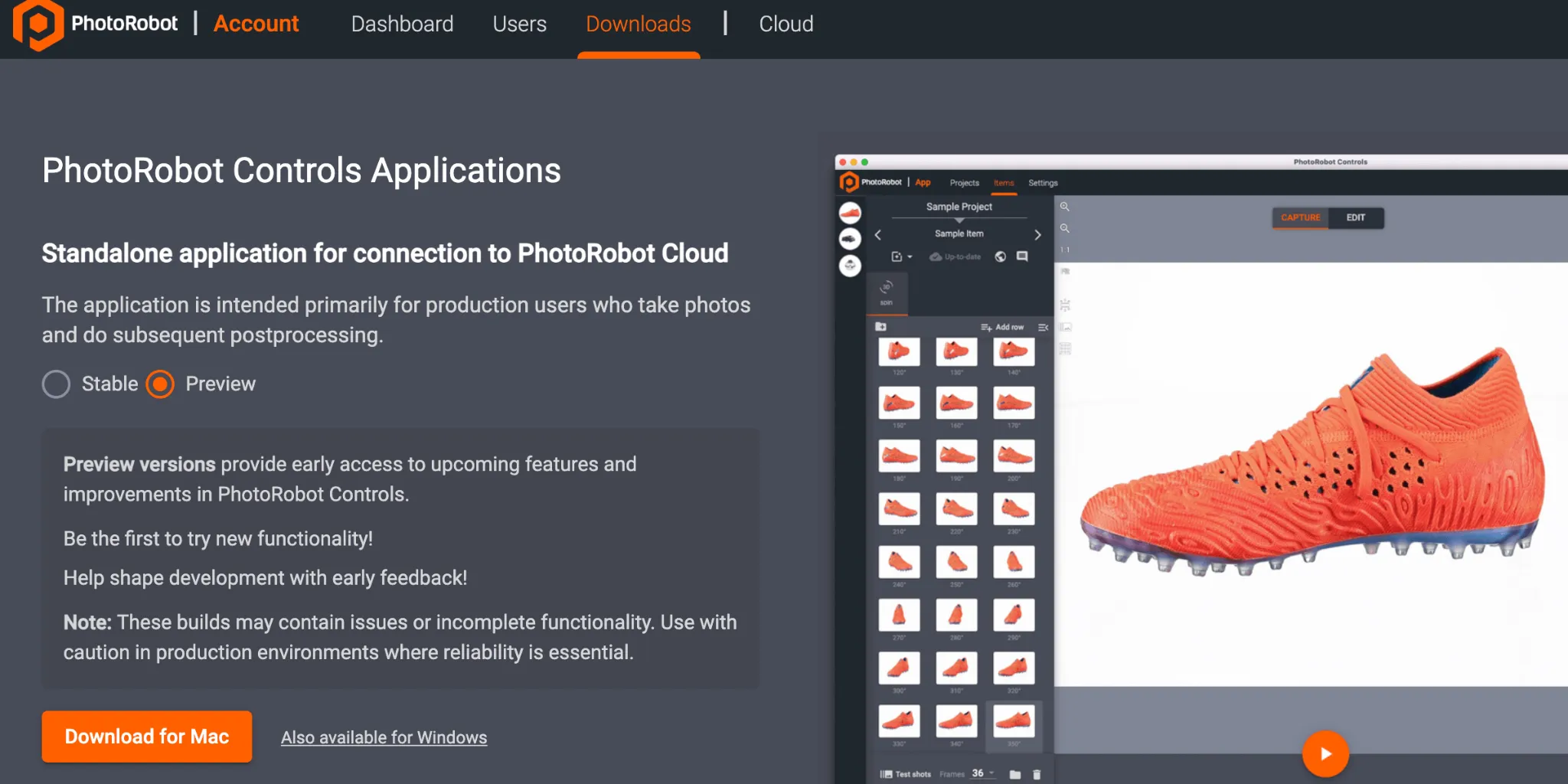
הערה: גם הגרסה היציבה וגם גרסת התצוגה המקדימה של CAPP זמינות להורדה באמצעות אשף ההתקנה. הגרסה היציבה מכילה את הגרסה העדכנית ביותר של CAPP, ומקבלת מהדורות גרסאות תכופות. בינתיים, גרסת התצוגה המקדימה של CAPP מספקת גישה מוקדמת לתכונות והתיקונים העדכניים ביותר שעוברים לגרסה היציבה תוך ימים מרגע הפיתוח. זה מאפשר למשתמשים לבדוק את כל הבעיות המתרחשות בגרסת התצוגה המקדימה לפני פנייה לתמיכה, מכיוון שרוב הבעיות המדווחות בגרסה היציבה כבר נפתרו בגרסת התצוגה המקדימה. עם זאת, שים לב שגירסת התצוגה המקדימה אינה מומלצת לשימוש בייצור שבו היציבות היא גורם קריטי. גרסת התצוגה המקדימה נמצאת בפיתוח פעיל, שעשוי עדיין לכלול תכונות לא שלמות או באגים לא פתורים.
חשוב: הגרסאות הישנות יותר של CAPP אינן מיועדות להפצה ללקוחות או להפצה ציבורית עקב הסיכון לפגיעה במסד הנתונים. גרסאות ישנות יותר של CAPP נגישות רק לטכנאי PhotoRobot מורשים לפיתוח פנימי, או למקרי שימוש מיוחדים במיוחד.
כדי למצוא את הגרסה היציבה האחרונה ואת גרסת התצוגה המקדימה של CAPP, עיין ב-גרסאות ההורדה האחרונות של CAPP.
תמיכה בהתקנה עצמית ופתרון בעיות
תהליך ההתקנה מתחיל בהורדת קובץ תוכנית ההתקנה.
שימו לב לדרישות להתקנת CAPP:
- למשתמש חייבות להיות זכויות הרשאת מנהל במחשב המתקין את CAPP.
- המחשב חייב לעמוד בכל דרישות המערכת והחומרה של PhotoRobot.
- במחשב חייבת לפעול מערכת הפעלה נתמכת עם העדכונים האחרונים.
חשוב: שימו לב גם ש-CAPP מורכב לא רק מפונקציות בקרה רובוטיות אלא גם מדוחפים למצלמות, אורות וציוד היקפי אחר. כתוצאה מכך, לעתים קרובות הגרסה העדכנית ביותר של Mac OS אינה נתמכת באופן מיידי. עם זאת, אם זה קורה, זה זמני בלבד ועד שכל הספקים הרלוונטיים ישחררו את הספריות התואמות.
למרות שזה עשוי להיות לא נוח, זה הרבה פחות נוח מבעיות תאימות בעת שימוש ב-CAPP. שדרוג לאחור הוא גם אפילו יותר מסובך מהימנעות משדרוג בטרם עת.
לאחר עמידה בדרישות מערכת ההפעלה והמערכת, ההתקנה ממשיכה באמצעות אשף ההתקנה. היכנס לחשבון PhotoRobot ולאחר מכן המשך בהגדרה על ידי ביצוע השלבים הבאים.
ההתקנה
אישור הסכמת המשתמש
בעת הורדת CAPP, הפעלת חשבון משתמש חדש דורשת אישור משתמש של הסכם הרישיון למשתמש קצה (EULA) ומסמכים קשורים אחרים.
לאחר הפעלת החשבון, ניתן לסקור את פרטי ההסכמה שנשלחו באמצעות גרסת הענן של CAPP בהגדרות פרופיל החשבון.
כדי לבדוק את פרטי ההסכמה שלך, פתח את גרסת הענן של CAPP, ולחץ על סמל חשבון המשתמש בפינה השמאלית העליונה של הממשק. לאחר מכן, בחר הפרופיל שלי מאפשרויות התפריט.

תפריט הפרופיל יציג את תמונת הפרופיל, פרטי משתמש כלליים (שם, טלפון, חברה), הגדרות סיסמה ופרטי ההסכמה. פרטי ההסכמה כוללים:
- שם מארח מחשב
- תאריך מוסכם
- הסכם רישיון לתוכנית בינלאומית של PhotoRobot
- הסכמה לעיבוד נתונים אישיים
- מידע על עיבוד נתונים אישיים
מצלמות תואמות
חשוב: כדי לוודא ש-CAPP מתקשר עם המצלמה כראוי, סגור את כל התוכניות האחרות שמתחברות למצלמה. כמו כן, הקפד להשתמש במצלמה תואמת מרשימת דגמי המצלמות התואמות PhotoRobot.
הערה: החל מהשקת PhotoRobot Controls App 2.5.4, כל מצלמה יכולה כעת להיות נתמכת באמצעות שילוב מצלמה של צד שלישי. עם זאת, לצילום אוטומטי, דגמי מצלמות Canon ללא מראה העדכניים ביותר הם האמינים והיעילים ביותר.
למרות שניתן להשתמש PhotoRobot מצלמות כף היד המוצעות באמצעות Wi-Fi או חיבור כבלים, פעולה זו עלולה ליצור בעיות.
- ייתכנו ניתוקי Wi-Fi תכופים (בעיקר עקב פסק זמן). אלה דורשים חיבורים מחדש גוזלי זמן למערכת.
- אם משתמשים במצלמה ידנית באמצעות חיבור כבל, קיים סיבוך של אורכי כבלים, ואת הסיכון לחיבורים.
לחיבור אייפון באמצעות PhotoRobot Touch App, שימו לב שאף אחת מהבעיות הללו אינה מתרחשת. האייפון יהיה מסוגל לצלם צילומי ידני בהגדרה המשתמשת בתאורה רציפה. עם זאת, אם צילום פלאש נחוץ, מצלמות ידניות תואמות יכולות לשמש כחלופה למצלמות המירורלס המומלצות. רק זכרו את הבעיות שעלולות להתעורר עם דגמי Wi-Fi וידניים מחוברים בכבל.
אורות תואמים
כדי ש-CAPP יוכל לתקשר עם התאורה, הקפד להשתמש ב-תאורת סטודיו תואמת PhotoRobot. אלה כוללים שני סוגי תאורה: אורות מבזק מבית FOMEI ו-Broncolor, וכל סוג של נורות LED עם תמיכת DMX.
הגדרת תמיכה מרחוק
מיד לאחר התקנת PhotoRobot Controls, מומלץ למשתמש להוריד ולהתקין את אפליקציית Splashtop SOS (EU-region). Splashtop SOS (EU) מאפשר לטכנאי PhotoRobot לגשת למחשב של לקוח ולספק סיוע טכני לאחר שהמשתמש מעניק הרשאה למקרה ספציפי.
הורדת Splashtop SOS במקביל ל-PhotoRobot Controls תסייע למנוע עיכובים בבקשות תמיכה טכנית מרחוק. קחו לדוגמה כאשר למשתמש אין מספיק הרשאות להתקין את היישום. לאחר התקנת Splashtop, הטכנאים שלנו יכולים להשתמש באופן מיידי ב-Splashtop Business כדי לגשת למחשב עם בקשת התמיכה הטכנית.
עם זאת, שים לב שהמשתמש חייב להוריד את גרסת אזור האיחוד האירופי של אפליקציית Splashtop SOS. אפליקציית גרסת אזור ארה"ב אינה מאפשרת לטכנאים שלנו לגשת למחשב שלך.
לכן, אנא ודא שאתה משתמש בקישור הבא לאזור האיחוד האירופי כדי להוריד את Splashtop SOS:
הערה: למידע נוסף על הגדרת תמיכה מרחוק למערכות PhotoRobot, עיין ב-הגדרת תמיכה מרחוק של PhotoRobot.
יצירת סביבת עבודה
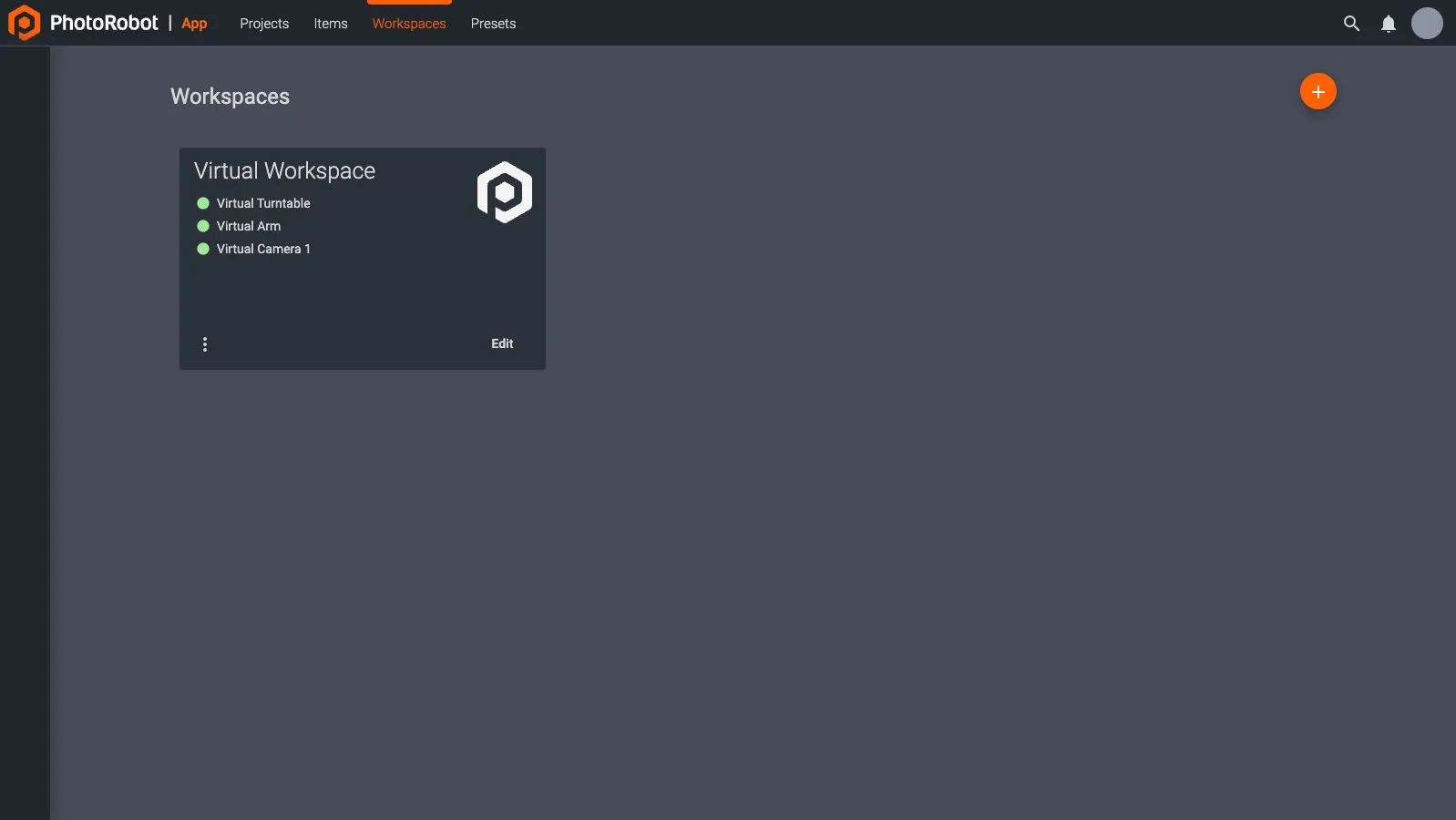
לאחר פתיחת CAPP, בדרך כלל הדבר הראשון שמשתמש עושה הוא ליצור סביבת עבודה. סביבת עבודה היא רשימה של חומרה הנמצאת בשימוש עבור צילומים מסוימים. זה יכול לכלול מודולים PhotoRobot שונים, מצלמות, אורות, ואביזרים אחרים.
למטרות הדגמה, משתמשים יכולים לעבוד עם סביבת עבודה לדוגמה מוגדרת מראש, שתצורתה נקבעה לשימוש בחומרה וירטואלית. בדרך זו, משתמשים עדיין יכולים להתנסות עם תכונות שונות של CAPP על ידי בחירת רובוטים וירטואליים ומצלמות.
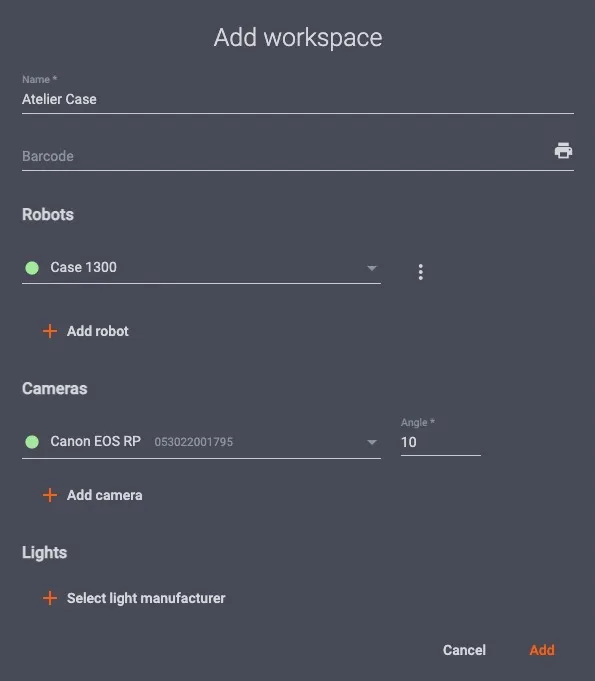
מחבר חומרה
כדי להתחיל להשתמש בחומרה ממשית (בניגוד לווירטואלית), ודא תחילה שהחומרה מחוברת לאותה רשת מחשבים (או לתת-רשת) כמו המחשב שבו אתה משתמש כדי לשלוט PhotoRobot.
הערה: החל מגרסה 2.5.4 של PhotoRobot Controls, כל מצלמה יכולה כעת להיות נתמכת באמצעות שילוב מצלמות צד שלישי. בינתיים, מצלמות תואמות כוללות מגוון דגמי מצלמות Canon, את מצלמות Canon המומלצות שלנו התומכות ב-Wi-Fi, וגם מצלמות אייפון אם משתמשים באפליקציית PhotoRobot Touch.
חשוב: לצילום אוטומטי באמצעות תחנת עבודה ROBOTIC, דגמי מצלמות Canon ללא מראה המומלצים על ידי PhotoRobot הם האמינים ביותר. בעוד שיש תמיכה במצלמות ידניות באמצעות חיבור Wi-Fi או כבל, השימוש בהן עלול ליצור בעיות. אלה כוללות ניתוקי Wi-Fi תכופים (בעיקר עקב פסק זמן), סיבוכים באורכי כבלים, וסיכון לחיבורים.
כדי לחבר מצלמה, עליה להיות מחוברת לאותה רשת מחשבים מקומית כמו הרובוט באחת משלוש דרכים:
- חיבור ישיר באמצעות USB לרשת התקשורת המקומית;
- חיבור של מצלמת כף יד מומלצת באמצעות פרוטוקול Wi-Fi מיוחד (נגיש ביישום Canon Tool בדף המפתחים של Canon);
- שילוב של אייפון אחד או יותר באמצעות אפליקציית PhotoRobot Touch. (לקבלת הוראות לשימוש ב-iPhone עם PhotoRobot, עיין/י במדריך למשתמש ביישום iPhone Touch.)
לאחר חיבור חומרת (או מצלמה) לסביבת עבודה, תוכלו לבדוק אם היא מקוונת (מוכרת על ידי CAPP). לשם כך, בדקו את הנקודה משמאל לשם הציוד הנתון. אם ההתקן מזוהה, תופיע נקודה ירוקה.
נקודה אפורה ליד שם ההתקן מסמלת שהחומרה לא זוהתה או אינה מופעלת. אם יש נקודה אדומה, קיימת שגיאה, כגון שהמשתמש לא העביר את המצלמה למצב ידני לדוגמה. כדי לזהות את סיבת השגיאה, רחף עם העכבר מעל הנקודה האדומה כדי להציג תיאור של השגיאה המתרחשת.
להדרכה המלאה שלב אחר שלב לחיבור חומרה להגדרת סביבת עבודה, עיין בהגדרת סביבת עבודה של PhotoRobot.
אם נתקלת בבעיות, אנא עיין ב-פתרון בעיות PhotoRobot לבעיות נפוצות ולפתרונותיהן.
הגדרת גובה זרוע רובוט
אם אתה משתמש בזרוע רובוט בסביבת העבודה, שים לב שככל הנראה תידרש הגדרה נוספת. הסיבה לכך היא שהזרוע הרובוטית היא מכונה עצמאית, ואחד התפקידים של שליטה בה באמצעות CAPP הוא שתנועת הגובה מיישרת את ציר הסיבוב לנקודת האמצע של גובה האובייקט המצולם.
גובה ציר הסיבוב של זרוע הרובוט נקבע על ידי סוג מכונת תחנת העבודה, ובמקביל על ידי התאמת רגלי הפילוס המפצות על כל חוסר אחידות של הרצפה. אם הכל מוגדר כראוי, המכונה ישרה, ומרכז הסיבוב נמצא בגובה מסוים מעל הרצפה. עם זאת, הגובה הכולל יהיה תלוי גם בגובה משטח הפטיפון, המשתנה בין רובוטים שונים. משמעות הדבר היא כי ייתכן שיש אי התאמה בהתייחסות לגובה, שכן יש מתאם גובה מתחת לעמודה של זרוע הרובוט כך שהוא מתיישר פחות או יותר.
כדי להבטיח יישור מושלם, לאחר מכן יש צורך להזין את הפרש הגובה בין הזרוע לבין הפטיפון לתוך CAPP. הפרש הגובה מודד את המרחק המדויק בין ציר הסיבוב של הזרוע הרובוטית לבין הגובה שבו ממוקם משטח הפטיפון (כולל כל לוח נוסף המונח עליו). זה מספק את הממדים המדויקים שמהם המערכת מחשבת מחצית מגובה האובייקט, ואת המיקום שבו הזרוע צריכה לנוע. זה גם מבטיח שהמערכת מוגדרת לפעול באופן אוטומטי ונכון.
שימו לב גם: המערכת מוגדרת לדחות ערכים החורגים מהטווח החוקי עבור הגדרה נתונה.
הגדר את מעלית זרוע הרובוט לרמת אפס
כדי להגדיר את מעלית ה-Robot ARM לרמת אפס, פתח תחילה את הגרסה המקומית של CAPP, וגש להגדרות סביבת עבודה באחת משתי דרכים:
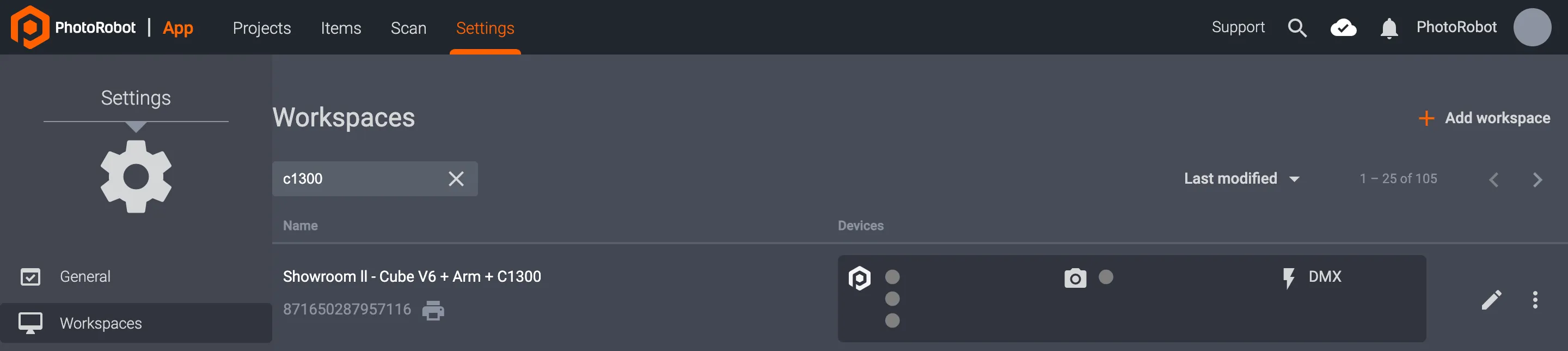
1. פתח את הגרסה המקומית של CAPP , לחץ הגדרות בחלק העליון של הממשק ובחר סביבות עבודה מאפשרויות התפריט השמאלי. בתפריט זה, אתר את סביבת העבודה הפועלת ולחץ על סמל העריכה לצד כותרת סביבת העבודה כדי לפתוח את ערוך הגדרות סביבת עבודה:
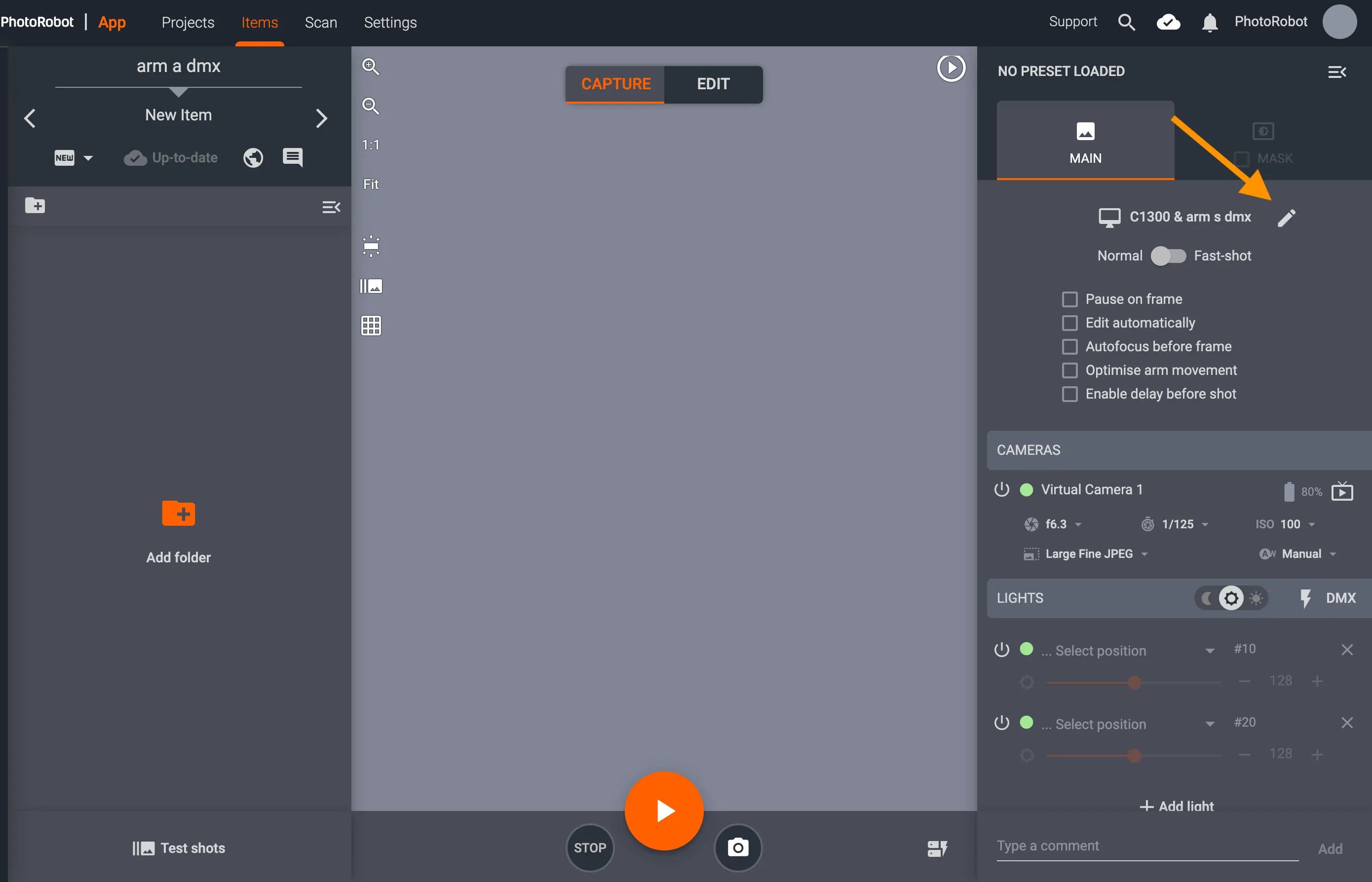
2. לחלופין, ניתן לגשת לתפריט ערוך סביבת עבודה על ידי פתיחת פריט במצב לכידה בגרסה המקומית של CAPP, ולאחר מכן לחיצה על סמל העריכה לצד כותרת סביבת העבודה בצד ימין של הממשק:
כל אחת מהשיטות תפתח את הגדרות סביבת העבודה 'עריכה'. לאחר מכן, כדי להגדיר את זרוע הרובוט, מצא את המכשיר תחת תפריט רובוטים ולחץ על 3 הנקודות האנכיות לצד השם זרוע הרובוט.
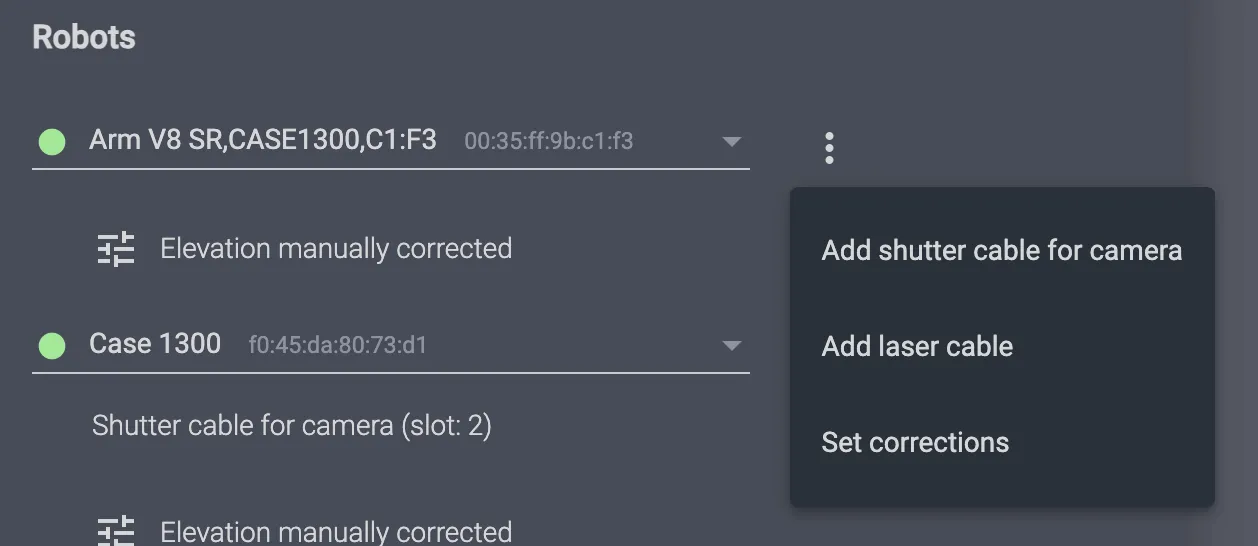
לאחר מכן, בחר באפשרות התפריט הגדר תיקונים כדי לפתוח את הגדרת פונקציית תיקון מעלית :
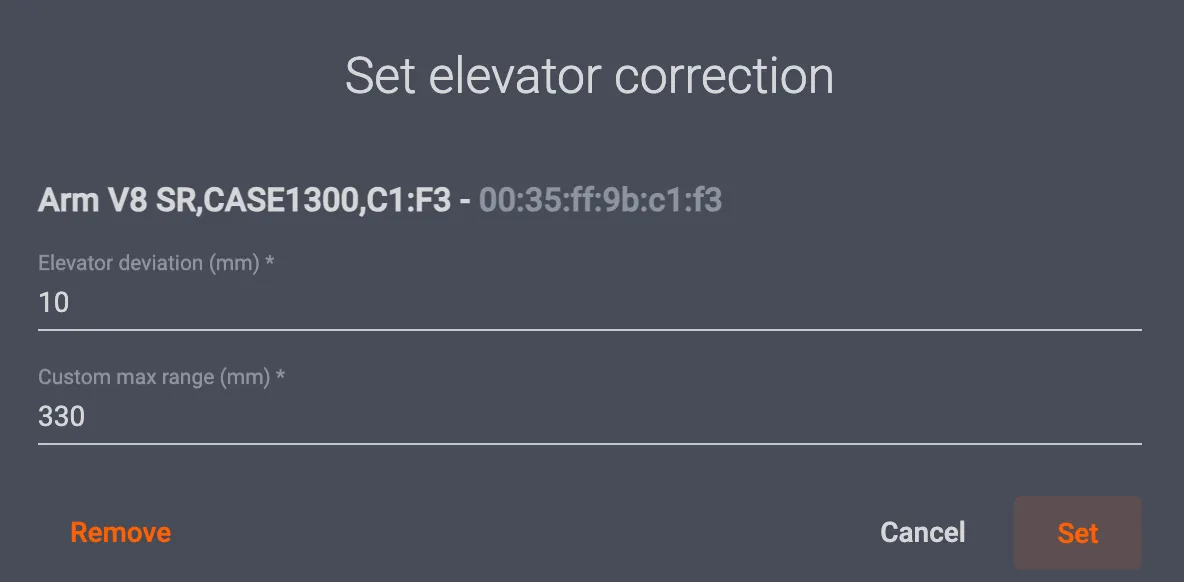
בתפריט הגדר תיקון מעלית, התאם את המספר בשדה העליון סטיית מעלית (מ"מ) כדי להגדיר את גובה המצלמה לרמת האפס המתאימה. לדוגמה, אם המצלמה כבויה במרכז ב- 10 מ"מ מעל הטבלה, הגדר את סטיית המעלית ל- -10 מ"מ כדי למרכז את המצלמה.
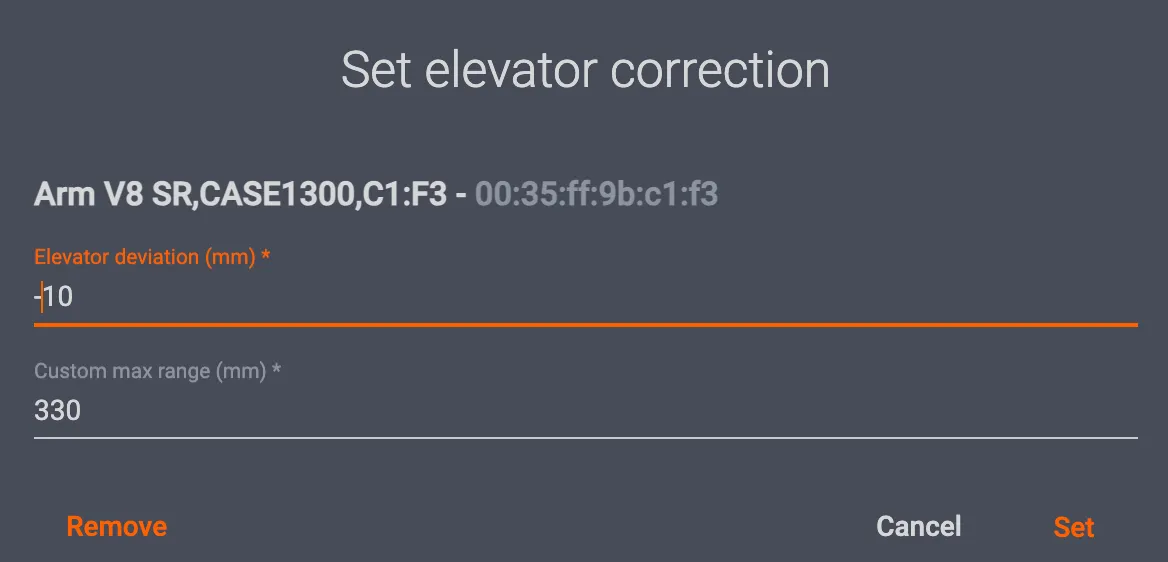
אם המצלמה כבויה במרכז ב- 10 מ"מ מתחת לטבלה, הגדר את סטיית המעלית ל- +10 מ"מ. פעולה זו תיישר נכון את גובה המצלמה המותקנת על זרוע הרובוט לרמת האפס המתאימה בתוכנה.
הערה: המעלית יכולה להגיע למקסימום של 330 מ"מ. לכן, אם התאמת רמת האפס על ידי +30 מ"מ, המעלית המקסימלית יכולה להגיע רק 300 מ"מ. משמעות הדבר היא שהמערכת תוכל ללכוד רק מוצרים קטנים יותר בהפרש זה, 30 מ"מ או פחות.
ניהול קבצים - פרוייקטים, פריטים ותיקיות
ב- CAPP, התמונות מאורגנות בפרוייקטים, פריטים ותיקיות.
- פרוייקט הוא ישות הנתונים ברמה הגבוהה ביותר. בדרך כלל, פרויקט יכלול פריטים מצילום יחיד או אולי יום/שבוע צילום אחד.
- פרוייקטים מורכבים מפריט אחד או יותר. פריט בודד יהיה בדרך כלל אובייקט מצולם ספציפי.
- פריט כולל תיקיה אחת או יותר. ב- CAPP, באפשרותך לכלול תיקיות מרובות בפריט יחיד כדי לשמור על סוגים שונים של תמונות בנפרד. דוגמה נפוצה מאוד היא שתהיה תיקיה אחת עבור מצגת מסתובבת של 360° (הנקראת "spin"), תוך שימוש בתיקיה אחרת לאחסון תמונות סטילס ("סטילס").
כדי להתחיל לצלם, תחילה עליך להוסיף פרויקט חדש (אלא אם כן כבר יש לך אחד שאתה רוצה להשתמש בו), כמו גם לפחות פריט אחד.
( ! ) - אם אתה נתקל בבעיות, מצא תמיכה נוספת לחיבור מצלמות, רובוטים, אורות ועריכה במדריך לפתרון בעיות PhotoRobot.
הגדרות כלליות - גיבוי אוטומטי בענן, עיבוד, אפליקציית מגע
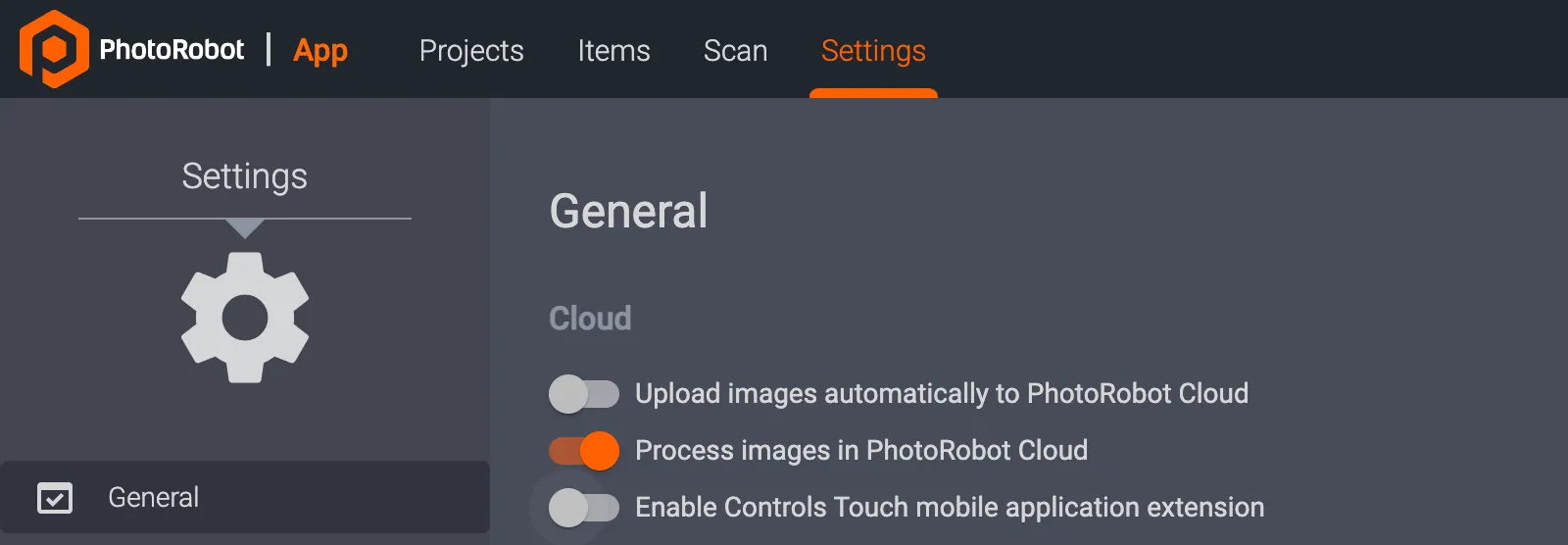
בגירסת שולחן העבודה המקומית של CAPP, קיימות 3 הגדרות כלליות להפעלה או לביטול:
- העלאת תמונות באופן אוטומטי לענן PhotoRobot
- עיבוד תמונות בענן PhotoRobot
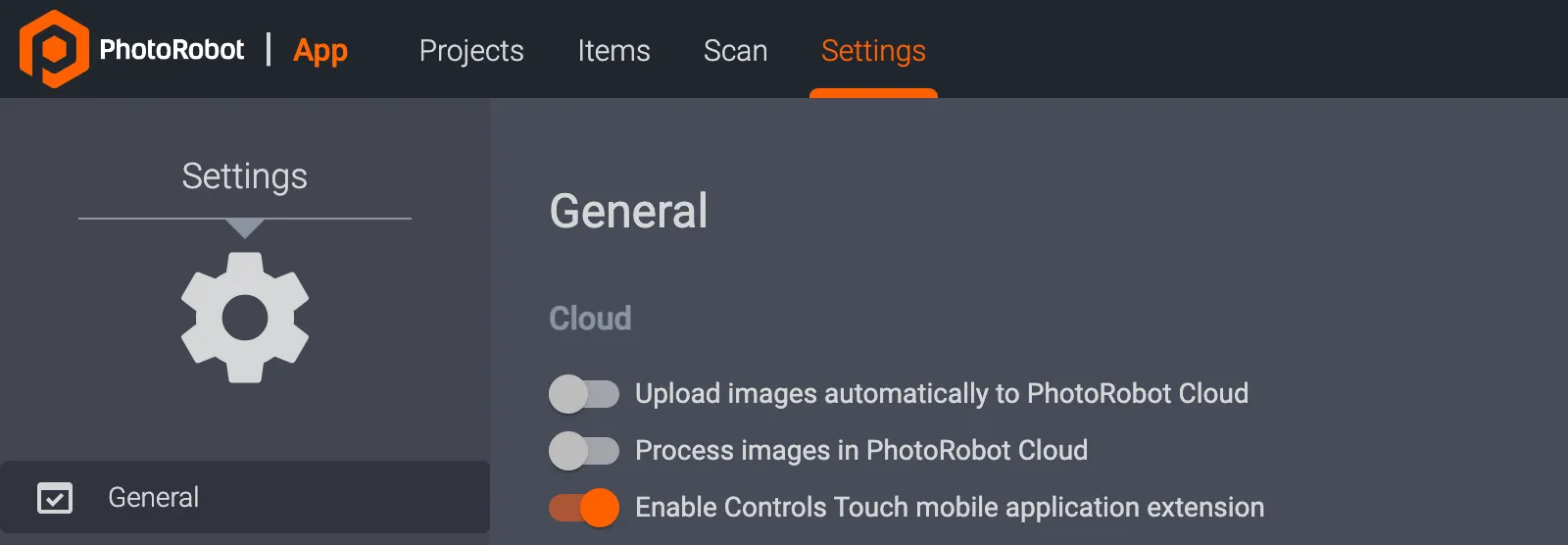
- הפעל פקדים Touch הרחבת יישום נייד
כברירת מחדל, האפליקציה המקומית תוגדר כהעלאת תמונות באופן אוטומטי לענן PhotoRobot. תכונה זו שומרת באופן אוטומטי גיבוי של תמונות שצולמו לשרת הענן שלך לייצוא מאוחר יותר.
כדי להשבית את האפשרות העלה תמונות באופן אוטומטי לענן PhotoRobot, בטל את האפשרות בגרסה המקומית של ההגדרות הכלליות של CAPP. פעולה זו תשמור במקום זאת פריטים שנתפסו באפליקציה המקומית שלך או בחשבון הענן שלך.
השתמש בבוררים הדו-מצביים גם כדי להפעיל או להשבית את התכונה עבד תמונות בענן PhotoRobot. כאשר היא מופעלת, תכונה זו מעבדת תמונות באופן אוטומטי בהתאם לקביעות מוגדרות מראש בענן PhotoRobot לאחר הלכידה.
אם אתה משתמש ביישום הנייד PhotoRobot Touch עבור iPhone, הפעל את האפשרות הפעל פקדים Touch Mobile Application Extension.
הערה: לקבלת הוראות טכניות בנוגע להתקנה ולתפעול של PhotoRobot Touch, עיין/י במדריך למשתמש ביישום PhotoRobot-iPhone Touch.
הגדרות כלליות - יצירה אוטומטית של פריט חדש
בנוסף, בהגדרות הכלליות בגרסת שולחן העבודה המקומית של CAPP, ישנן הגדרות סורק הברקוד המאפשרות קביעת תצורה של אפשרויות מתקדמות עבור קורא הברקוד. השתמש בלחצן הדו-מצבי משמאל ליצירה אוטומטית של פריט חדש במערכת בעת סריקת ברקוד לא ידוע כדי להפעיל או להשבית יצירה אוטומטית של פריטים.
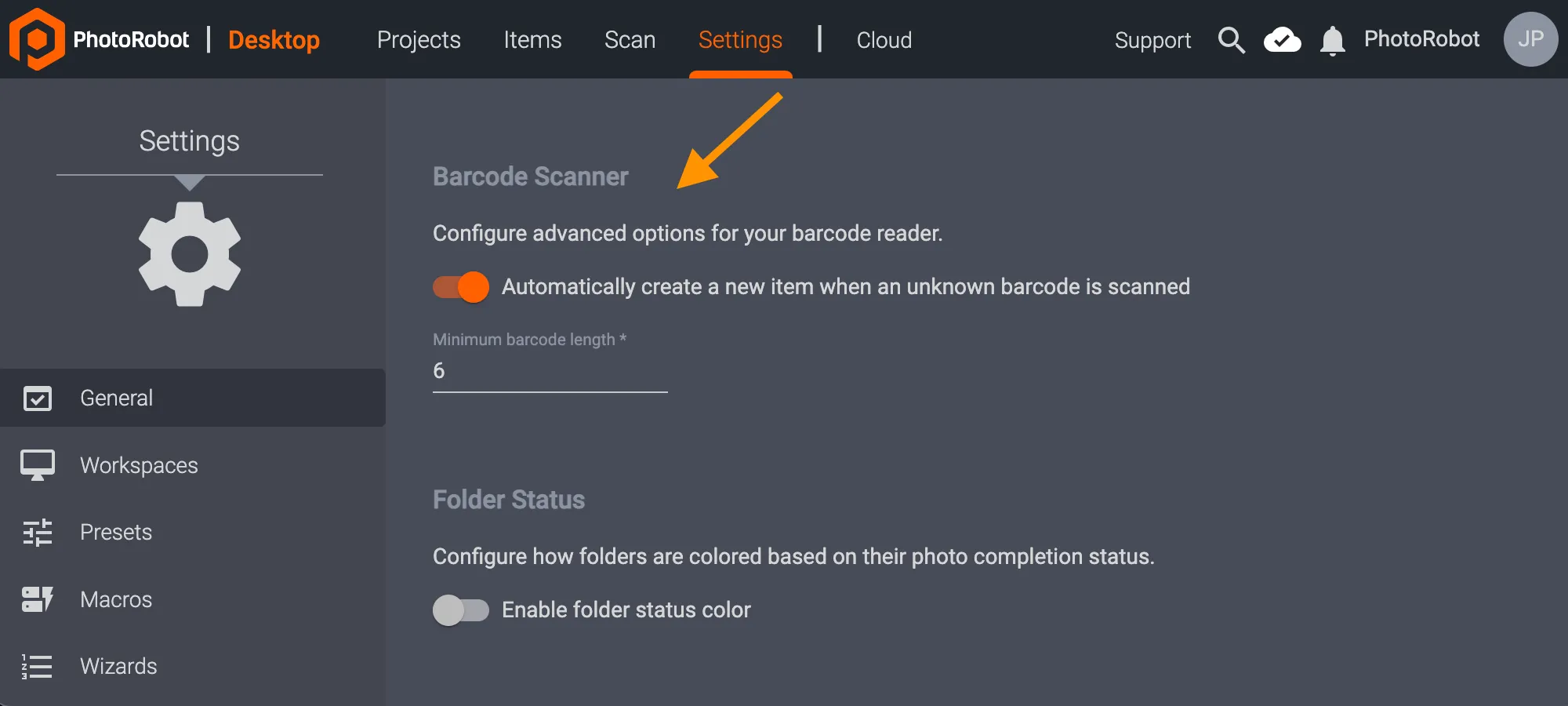
כאשר ההגדרה פעילה, היא תפעל כחלופה ליצירה ידנית של פריטים. זה מאפשר זיהוי של פריט בנקודת הלכידה (בדרך כלל באמצעות ברקוד או קוד QR). מפעיל פשוט סורק קוד לא ידוע, ופריט חדש נוצר אוטומטית בפרויקט. מתן שמות לפריט יהיה בהתאם למחרוזת הסרוקה ובשדה המזהה של הפריט. לאחר מכן, המפעיל מצלם את הפריט.
בדרך זו, אין צורך לבצע פעולות הקשורות למלאי בתוך תוכנת הסטודיו. לדוגמה, מספיק לסרוק פריט חדש ולאחר מכן לסרוק קוד מוגדר מראש (מדף) לצילום (למשל עבור פריטים לבנים, כהים או צבעוניים). לאחר מכן המערכת תספק באופן אוטומטי ומיידי סט שלם של תמונות, לאחר מכן תעבד אותן במלואן ותפיץ אותן עם שמות אוטומטיים למערכת היעד.
יתר על כן, החל מגרסה 2.13.beta58 של CAPP, קיימת כעת אפשרות להגדיר את אורך המחרוזת המינימלי עבור ברקודים. בעבר, האורך המינימלי של ברקוד / קוד QR היה 6 תווים (כדי למנוע פרשנויות כפולות של המחרוזת הסרוקה, בין היתר). כעת, ההגדרה אורך ברקוד מינימלי ניתנת להתאמה כדי לאפשר, לדוגמה, למזהים בני ארבעה תווים לפעול ללא צורך בהתאמות נוספות.
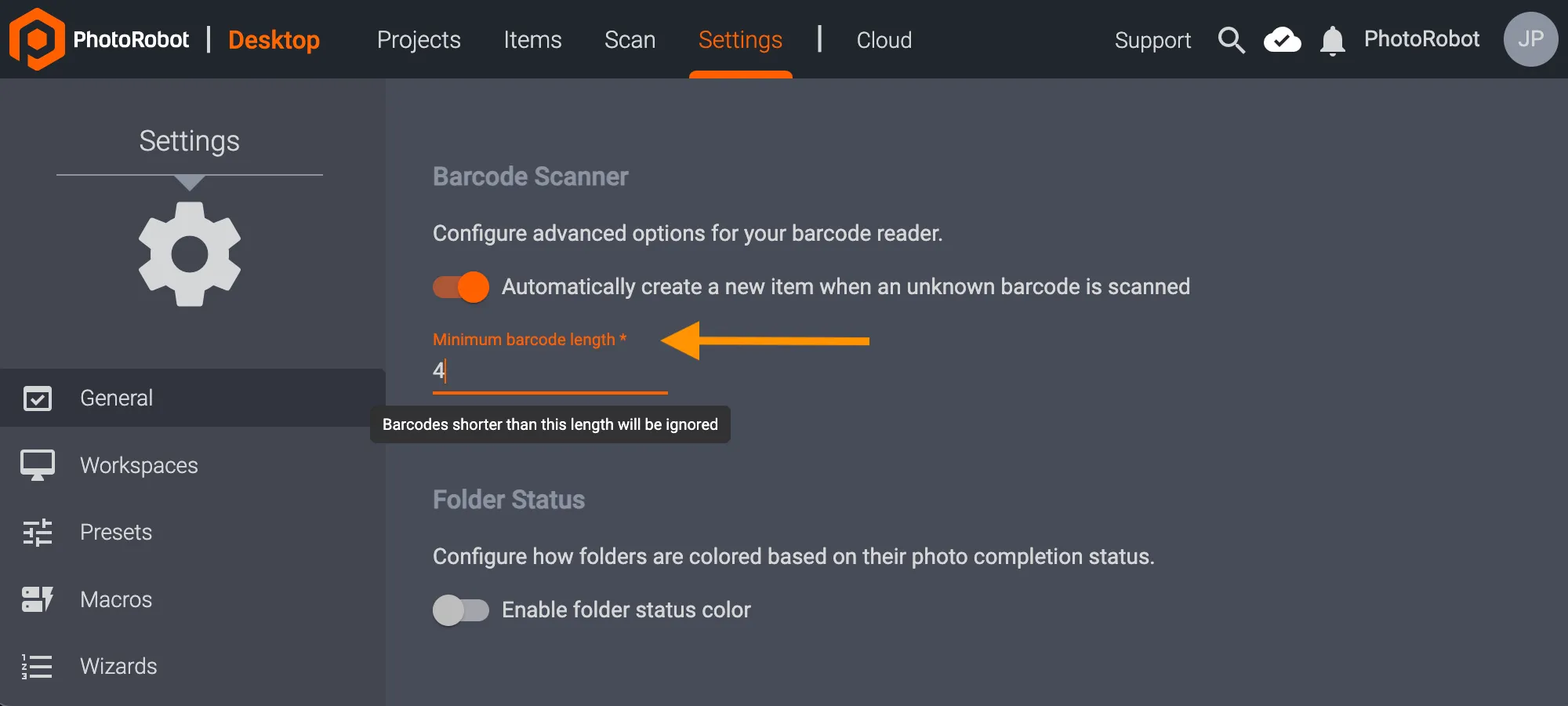
כדי להתאים את אורך המחרוזת המינימלי עבור ברקודים / קודי QR, הגדר את אורך הברקוד המינימלי גם בגרסה המקומית של CAPP בהגדרות כלליות - סורק ברקוד. לאחר מכן המערכת תתעלם מברקודים קצרים יותר מקלט האורך.
הערה: לאחר שהוקצה לפריט ברקוד במערכת, הברקוד יהיה נגיש גם ישירות בממשק מצב הלכידה באזור המידע על הפריט באמצעות כפתור ברקוד.
הענקת גישה חיצונית ללקוח לנתוני פרוייקט
כדי לעבוד עם לקוחות מחוץ לארגון של חשבון CAPP בתשלום, מנהל החשבון יכול ליצור חשבונות לקוח ללא תשלום. חשבונות לקוח מאפשרים ללקוח חיצוני להציג נתוני פרוייקט, להשתתף בהבטחת איכות באמצעות סקירה והערות ולגשת לנכסי פרוייקט להורדה. תכונה זו מיועדת למצבים בהם סטודיו לצילום עובד עם לקוח חיצוני הדורש גישה לעבודות ספציפיות.
על מנת לשתף פרויקט עם לקוח מחוץ לארגון שלך, הקפד תחילה להיכנס לגרסת הענן של CAPP באמצעות פרופיל משתמש עם הרשאת מנהל.
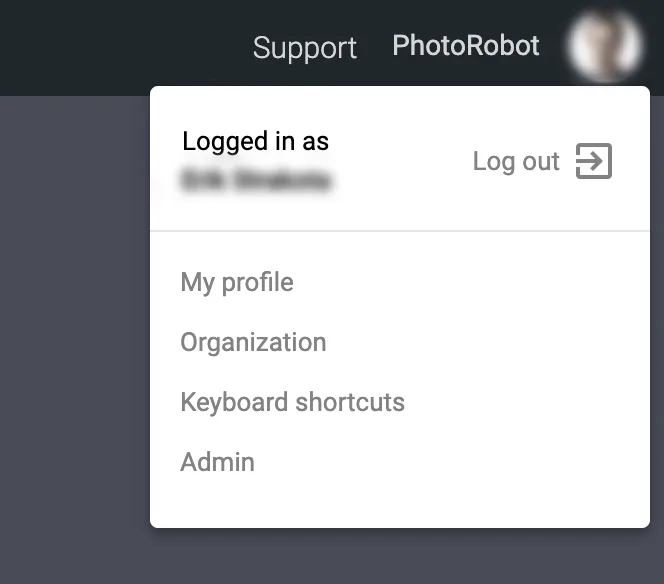
1. היכנס לאפליקציה מבוססת הענן באמצעות פרופיל חשבון CAPP בתשלום עם הרשאת מנהל, ולחץ על סמל תפריט פרופיל המשתמש בפינה השמאלית העליונה של לוח המחוונים. לאחר מכן, לחץ על ארגון כדי לגשת ללוח הניהול.
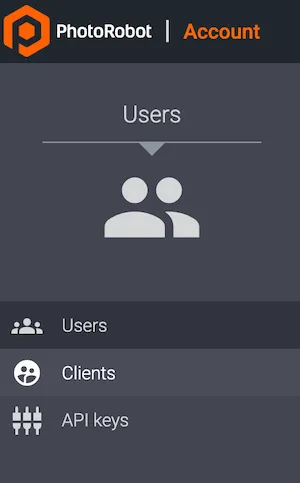
2. לאחר מכן, מלוח הניהול של הארגון, לחץ על משתמשים מאפשרויות החשבון בחלק העליון של ממשק המשתמש.

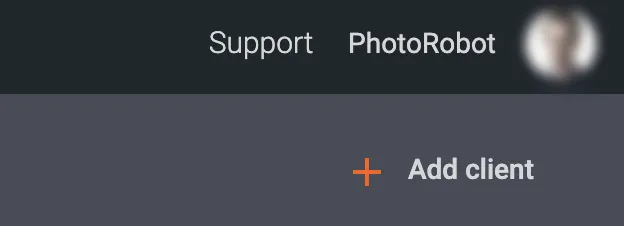
3. לחץ על לקוחות כדי ליצור אפשרות משתמש חדשה כדי לגשת לתכונת הוספת לקוחות מממשק החשבון. לחצן + הוסף לקוחות יופיע בפינה השמאלית העליונה של לוח המחוונים מתחת לסמל פרופיל המשתמש.
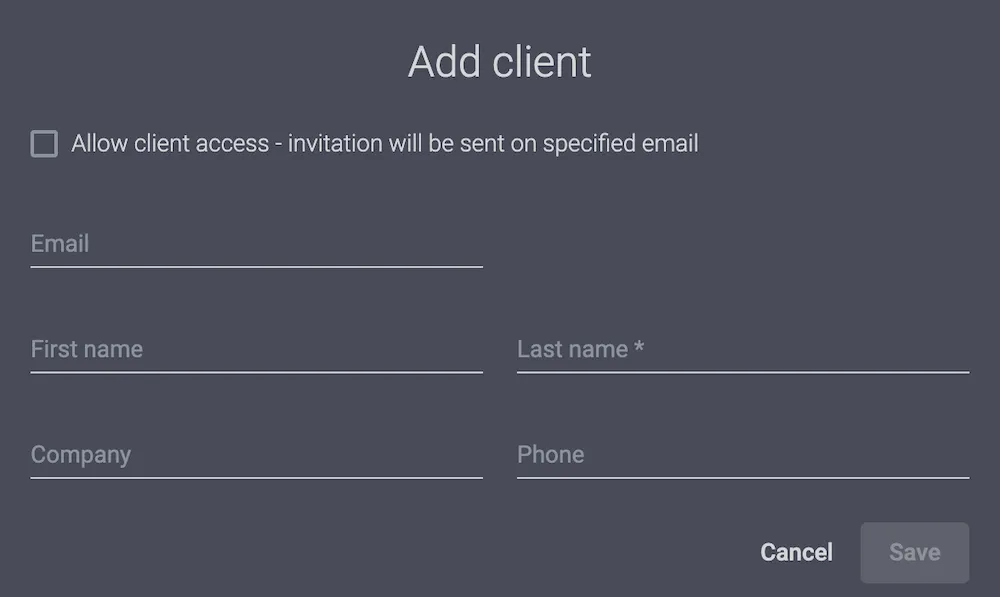
4. לחץ על + הוסף לקוח מתחת לסמל פרופיל המשתמש.
5. מלאו את השדות לפרטי הלקוח (דוא"ל, שם, חברה, טלפון), וסמנו את התיבה אפשר גישה ללקוח. סקור את המידע לדיוק ולחץ על שמור כדי להוסיף את הלקוח ל-CAPP.
6. פתח פרויקטים בגרסת הענן של CAPP, מצא את הפרויקט שברצונך לשתף עם הלקוח השמור, העבר את העכבר מעל סרגל הפרויקט ולחץ על סמל השיתוף מימין לפרטי הפרויקט.
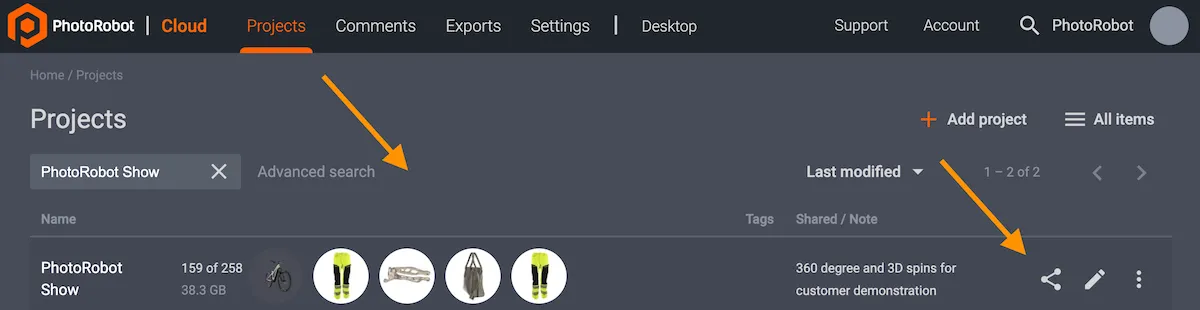
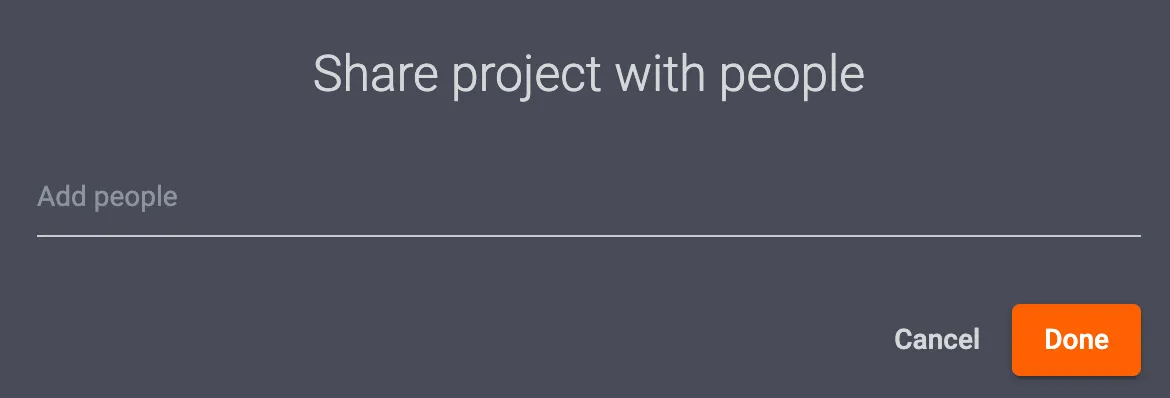
7. לחץ על סמל השיתוף בצד ימין של סרגל הפרויקט כדי לפתוח את התכונה שתף פרויקט עם אנשים , בחר לקוחות שמורים ולחץ על סיום. הפרויקט משותף כעת עם הלקוח, ומאפשר לו לצפות בעבודה ולהגיב ב-CAPP לאבטחת איכות והנחיות נוספות במידת הצורך.
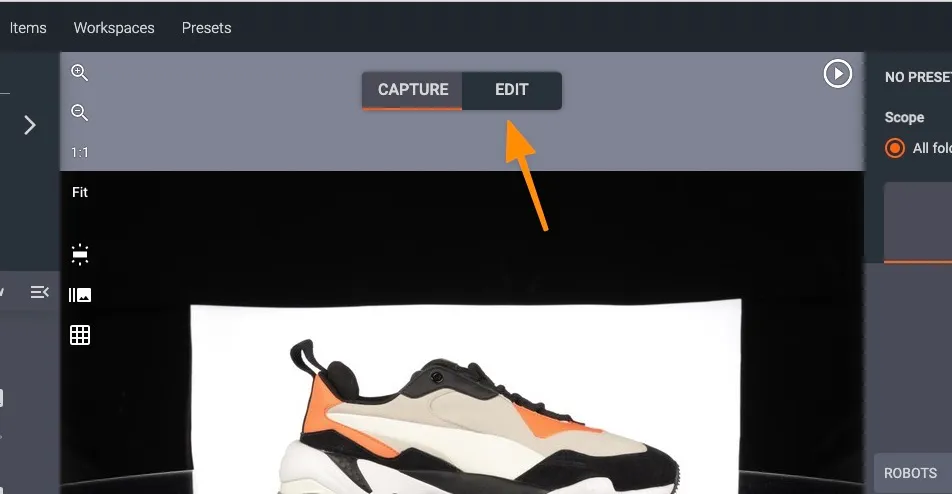
ממשק מצב לכידה
לאחר לחיצה על פריט, תועבר לממשק לכידה/עריכה. הפקדים הזמינים לשינויים בהתאם לשאלה אם מצב הלכידה פעיל או מצב העריכה . מצב הלכידה משמש לשליטה ברצף הצילום, בעוד שמצב העריכה שולט בכל לאחר העיבוד המבוצע בתוך CAPP. המצב הפעיל יודגש בחלק העליון של המסך:
הוספת תיקיית סיבובים, תמונות סטילס או וידאו
לפני כל צילום, עליך ליצור תיקיה אחת לפחות. הסוגים העיקריים של תיקיות הם ספין (המשמש למצגות של 360°), תמונות סטילס (עבור תמונות סטילס) ווידאו (עבור סרטוני וידאו).
יצירת תיקיית ספינים
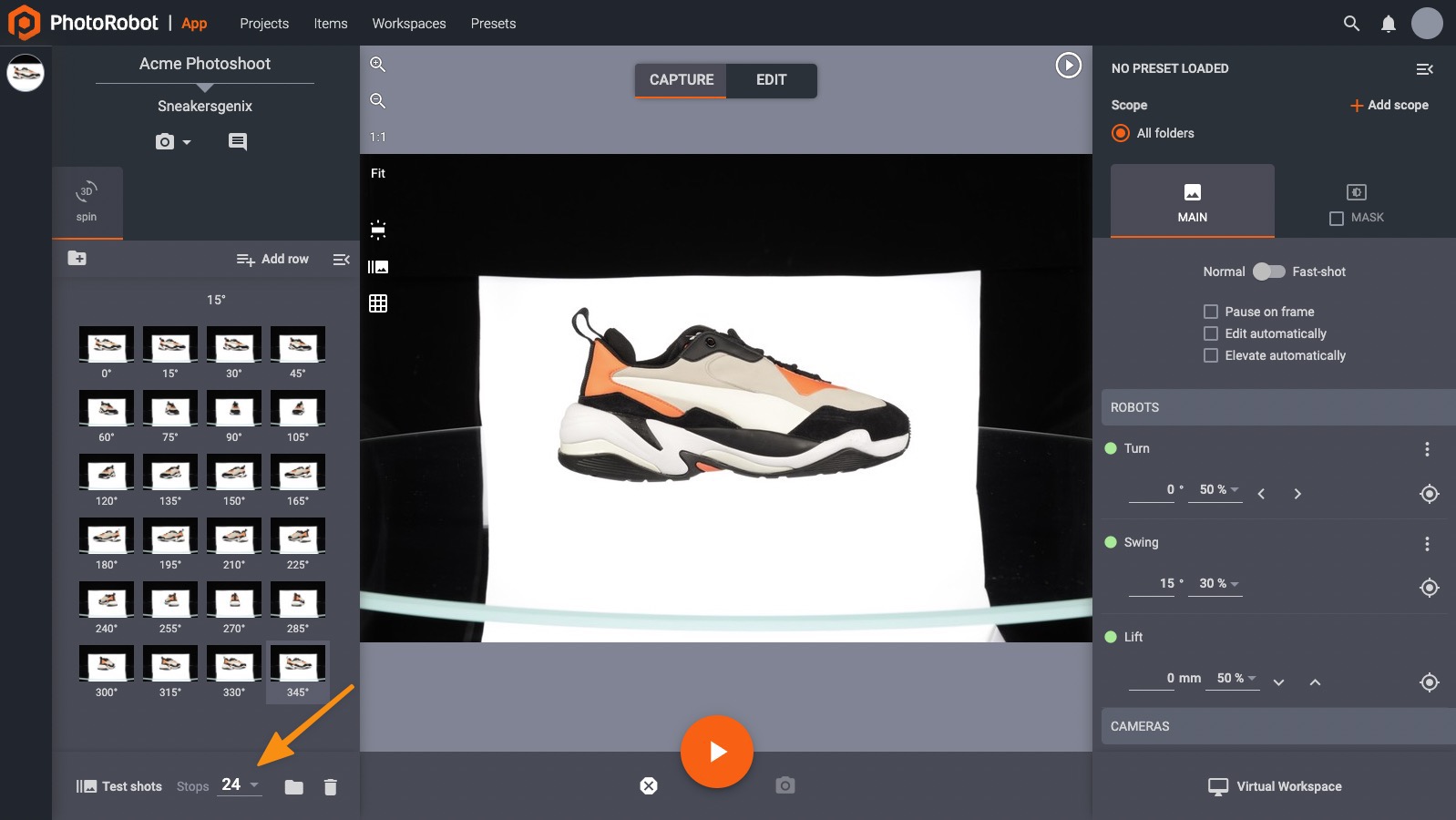
בעת הוספת תיקיית ספין, CAPP יוסיף באופן אוטומטי עצירות (הנקראות גם "מסגרות") בהתבסס על מספר התמונות בכל ספין שתבחר. מספר ברירת המחדל הוא 36, וניתן לשנות זאת בפינה השמאלית התחתונה. עם מספר גבוה יותר של עצירות, הסיבוב יהיה חלק יותר, אך הוא גם יתפוס יותר מקום אחסון.
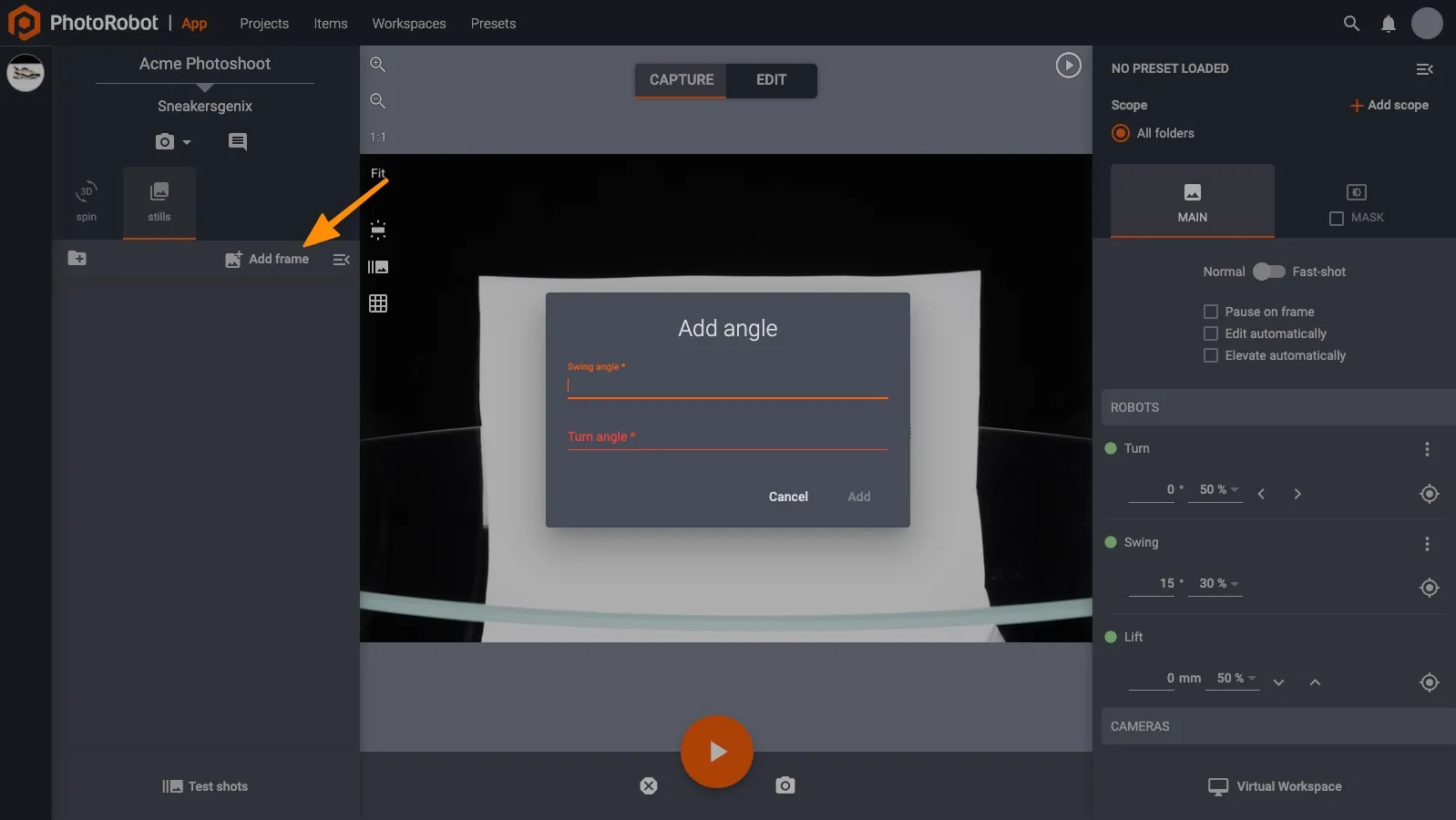
יצירת תיקיית סטילס
אם תבחר תיקיית סטילס, עליך להוסיף את העצירות באופן ידני. זה יכלול זווית סיבוב (זווית הסיבוב) וזווית נדנדה (המיקום האנכי של המצלמה לאורך מסלול מעגלי). זווית הנדנדה חשובה אם אתה משתמש בזרוע הרובוטית שלנו או במודול אחר שיכול לשנות את המיקום האופקי של המצלמה.
ייבוא תמונות
במקרים מסוימים, ייתכן שתרצה לייבא תמונות לתיקייה חדשה או קיימת ב- CAPP. לדוגמה, ייבוא תמונות כף-יד, צילומים מפורטים או תמונות שונות אחרות.
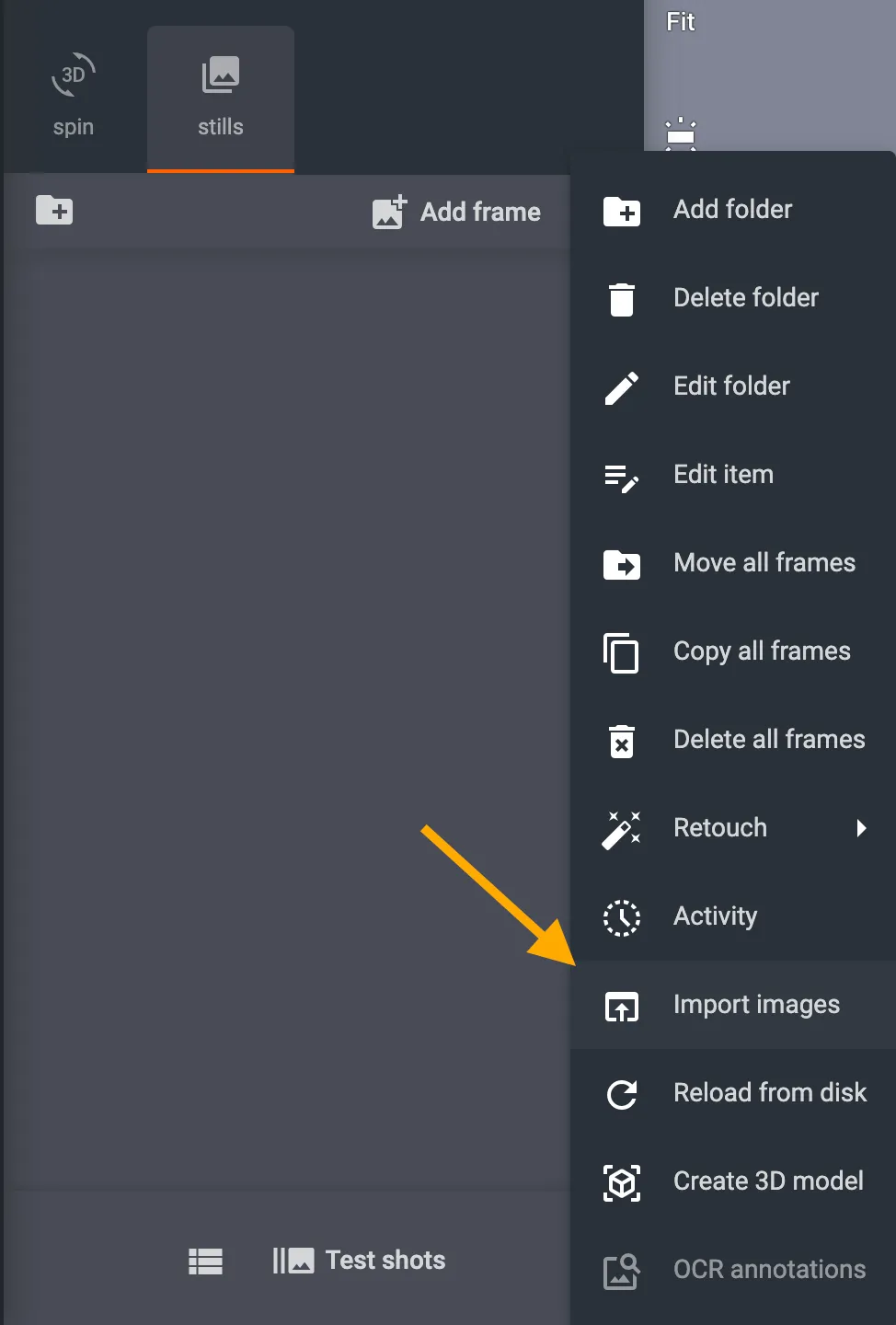
כדי לייבא תמונות ל- CAPP, פתח תחילה פריט חדש או קיים בממשק מצב לכידה ב- CAPP. לאחר מכן, לחץ על הסמל של תפריט פעולות התיקיה בפינה השמאלית העליונה של ממשק התיקיות.
לאחר מכן, באפשרויות תפריט פעולות תיקיה, חפש ולחץ על ייבוא תמונות מהרשימה.
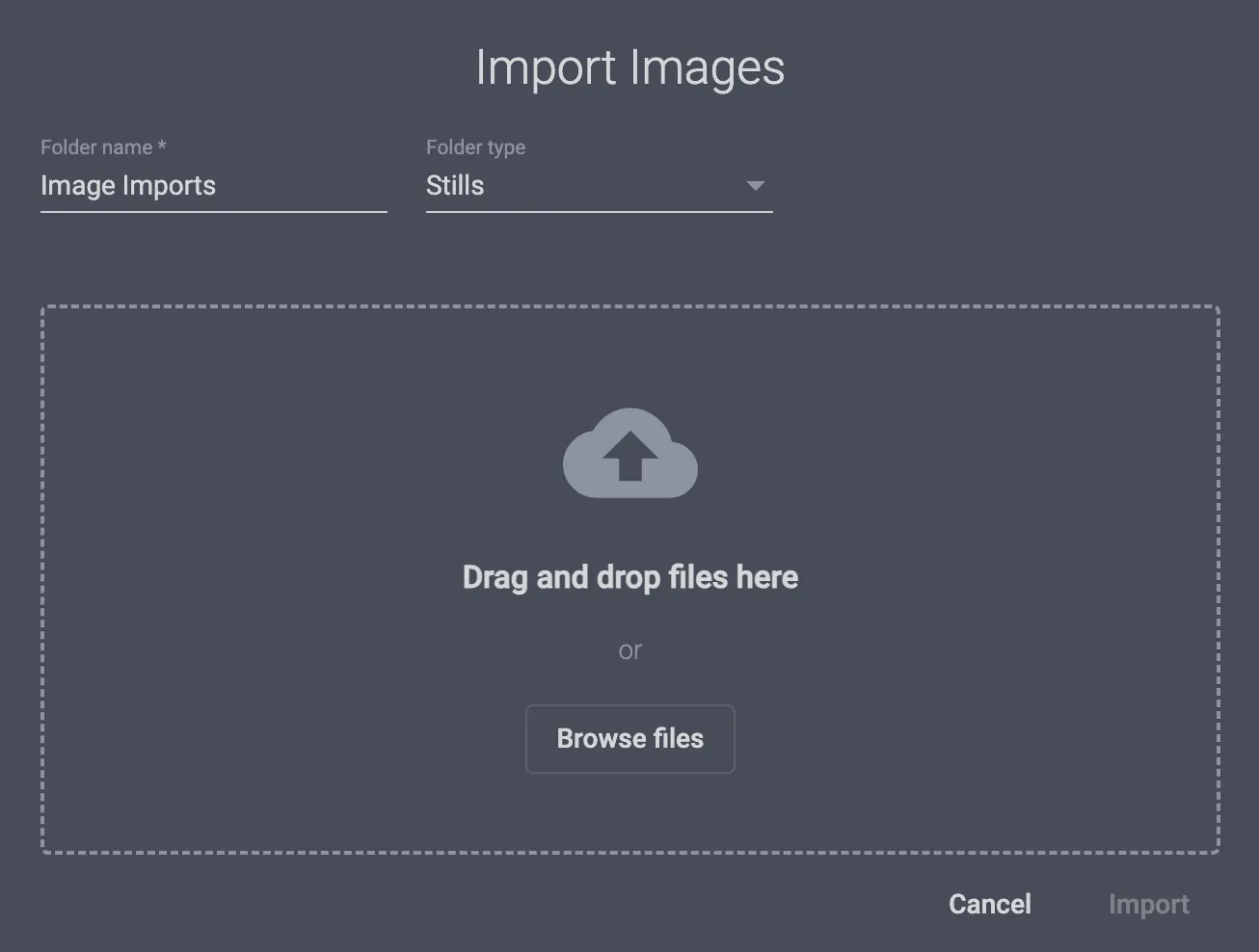
לחיצה על ייבוא תמונות תפתח חלון מוקפץ המאפשר ייבוא תמונות בגרירה ושחרור או על-ידי עיון בקבצים מקומיים. בחלק העליון של החלון, ניתן גם להגדיר את שם התיקיה ואת סוג התיקיה עבור התמונות המיובאות.
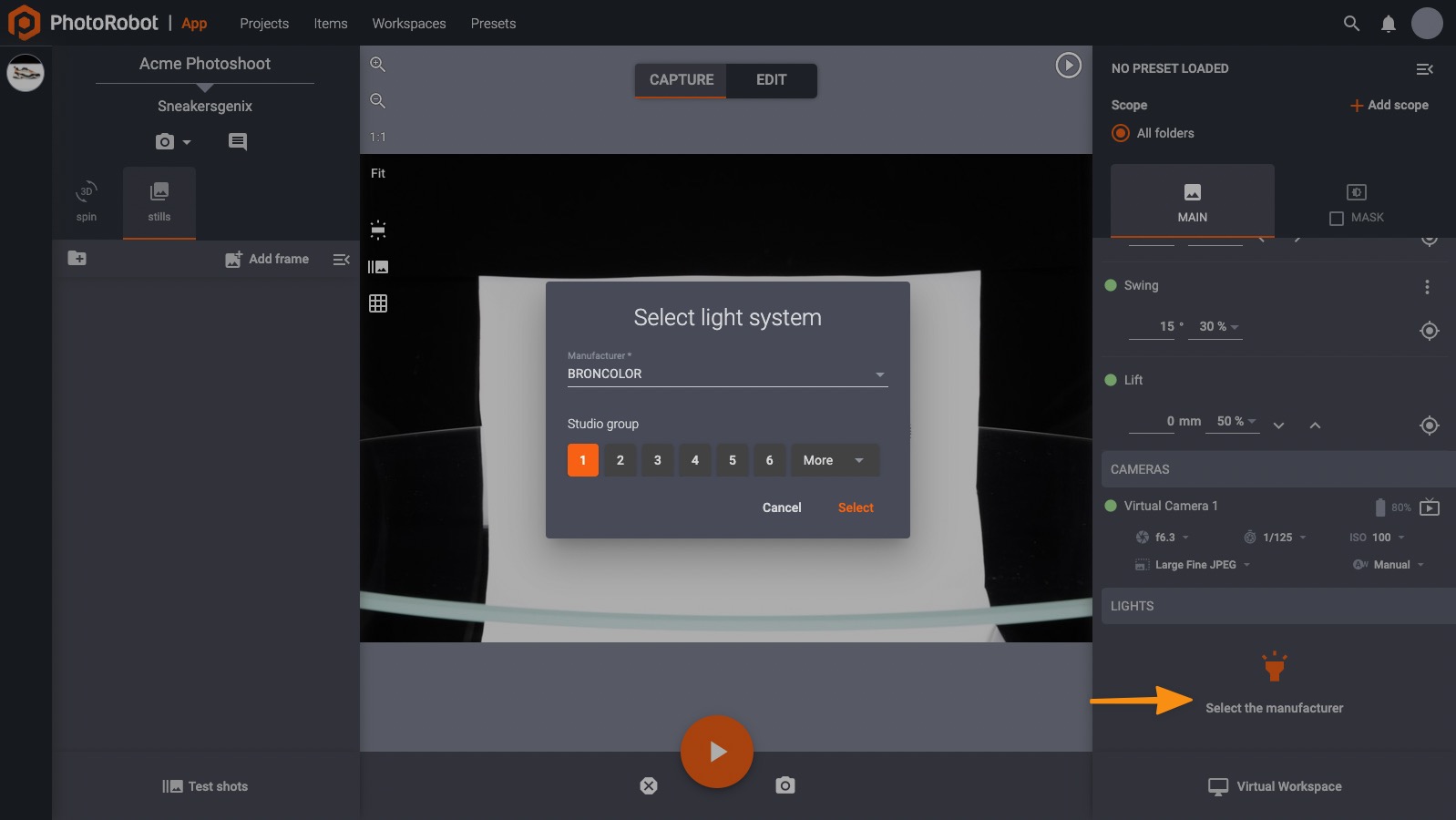
שליטה באורות תואמים
בעת שימוש בנורות התואמות ל- CAPP, באפשרותך לבחור נורות בפינה השמאלית התחתונה של חלון מצב העריכה.
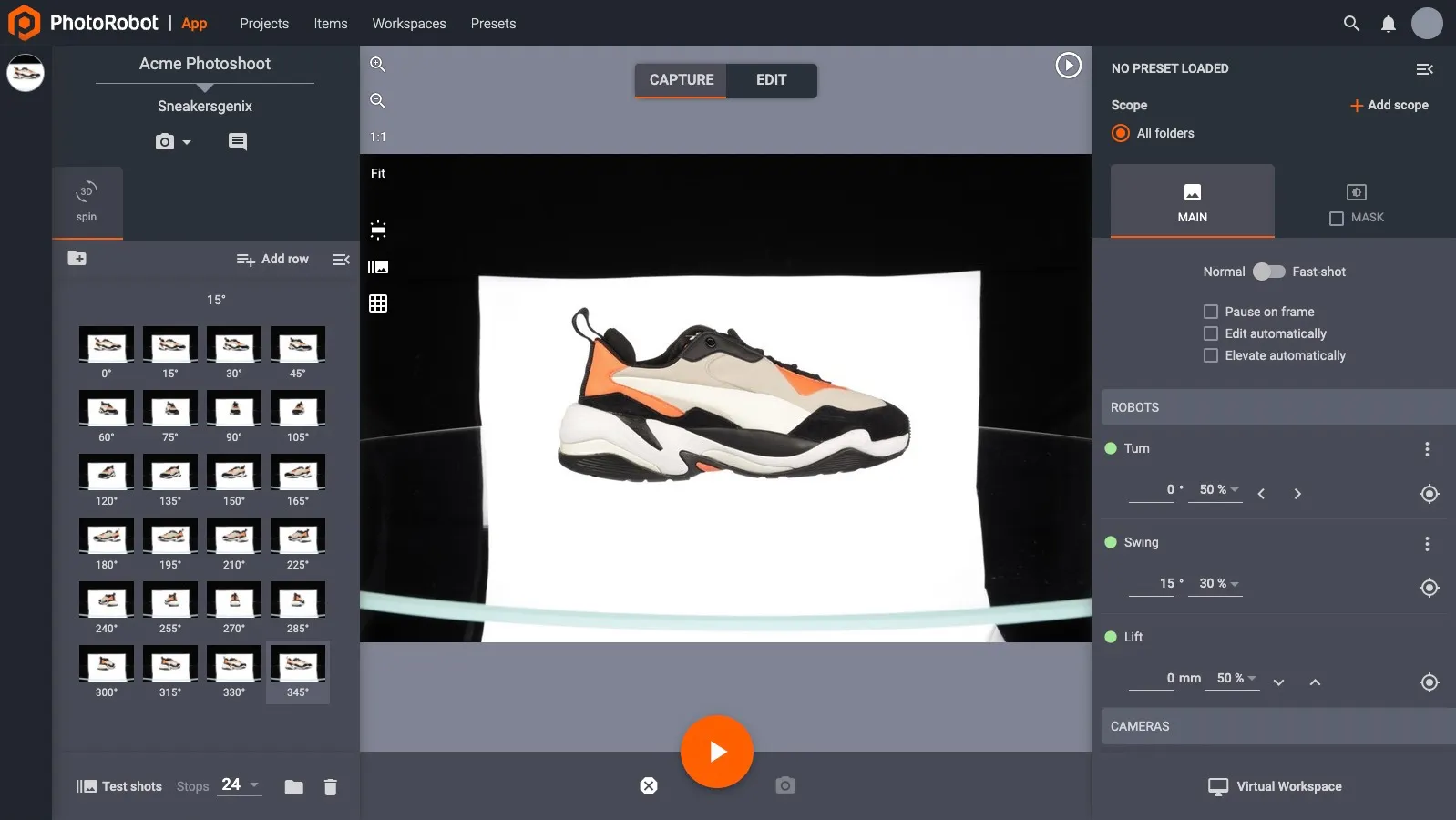
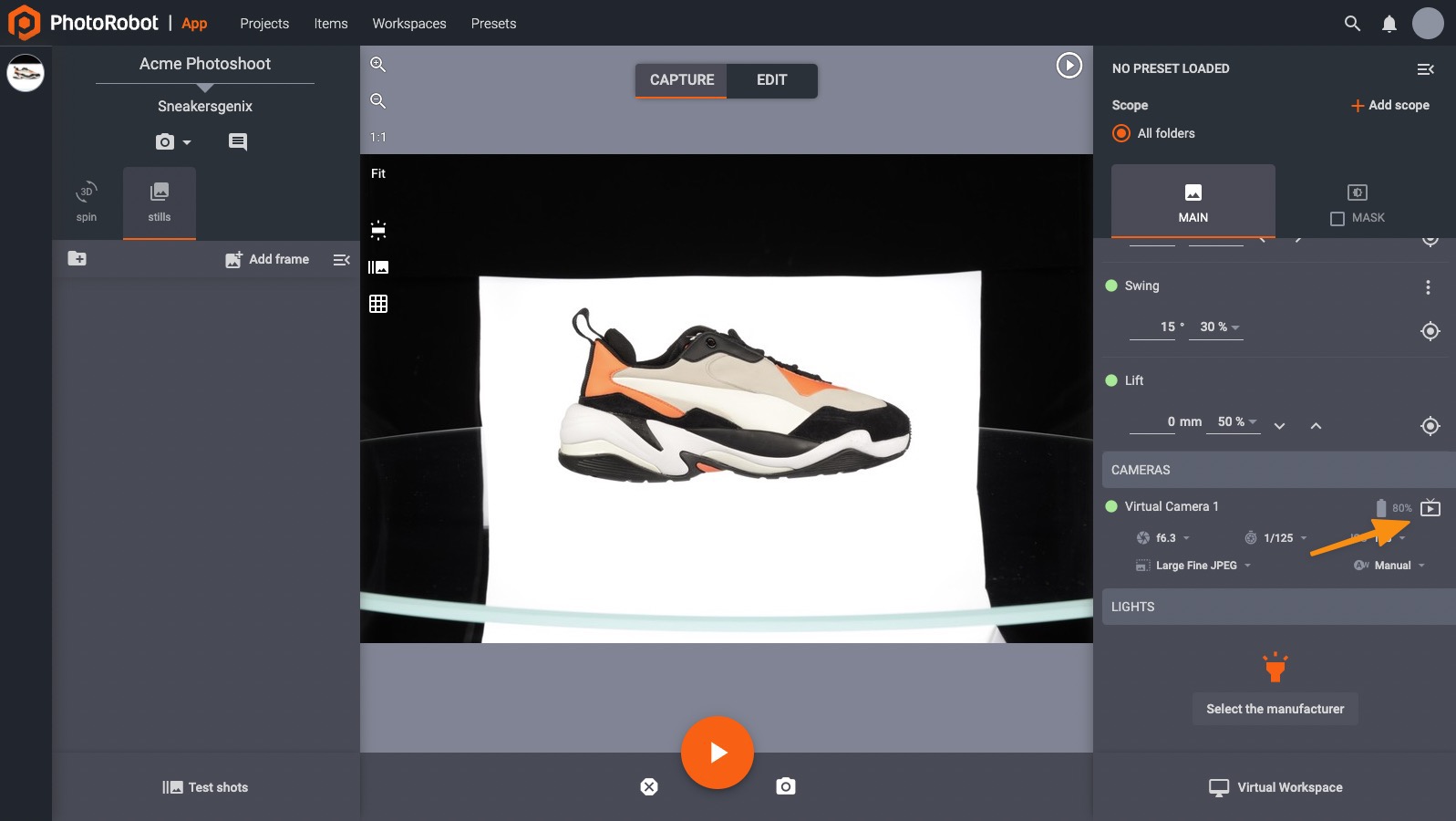
מבט כולל על ממשק מצב לכידה
החלק המרכזי של ממשק מצב הלכידה כולל את חלון התצוגה המקדימה, המציג את התמונה הנוכחית שנבחרה (אם כבר צילמת חלק) או את התצוגה החיה המוזרמת מהמצלמה.
Live View, שימושי אם ברצונך לבדוק קור רוח ומיקוד, ניתן להחליף באזור בקרת המצלמה בחלק המרכזי של סרגל הבקרה בצד ימין של המסך.
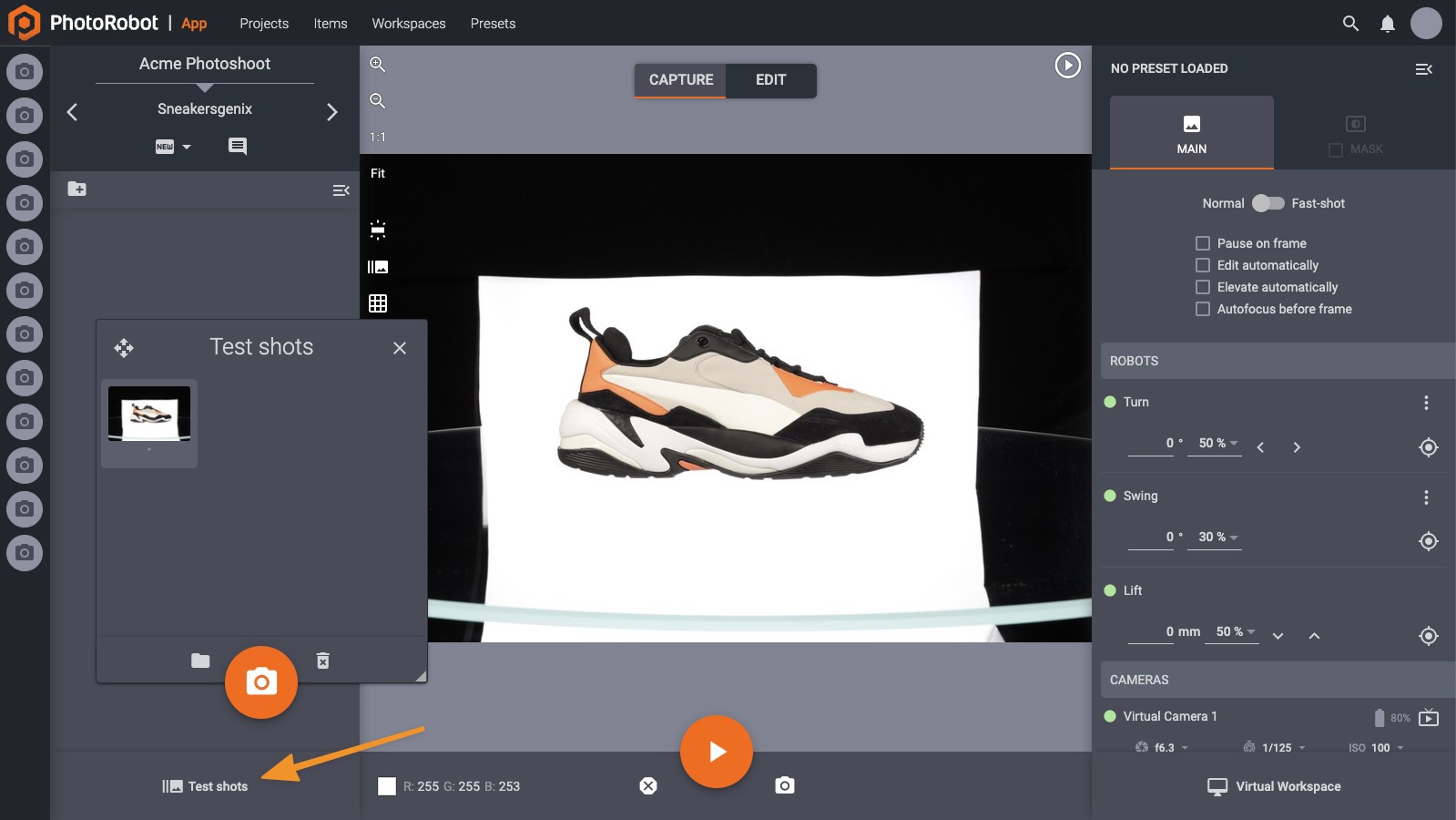
לוקח צילומי מבחן
לפני צילום תמונות סופיות, מומלץ לצלם צילום מבחן אחד או יותר. הדרך הקלה ביותר לעשות זאת היא על-ידי הקשה על מקש T בלוח המקשים של המחשב. זה יעזור לך לבדוק אם אתה צריך לשנות את ההגדרות של האורות שלך, מצלמה, וכו '. תמונות בדיקה מאוחסנות בתיקיה "צילום בדיקה", שאליה ניתן לגשת בחלק הימני התחתון של המסך.
מתחיל רצף צילום
כאשר מרוצים מההגדרות, אשר אומתו על ידי צילום מבחן, הגיע הזמן להריץ את רצף הצילום. ניתן להפעיל זאת על-ידי לחיצה על מקש הרווח בלוח המקשים או על-ידי לחיצה על לחצן "התחל" המוצג בתמונה שלהלן.
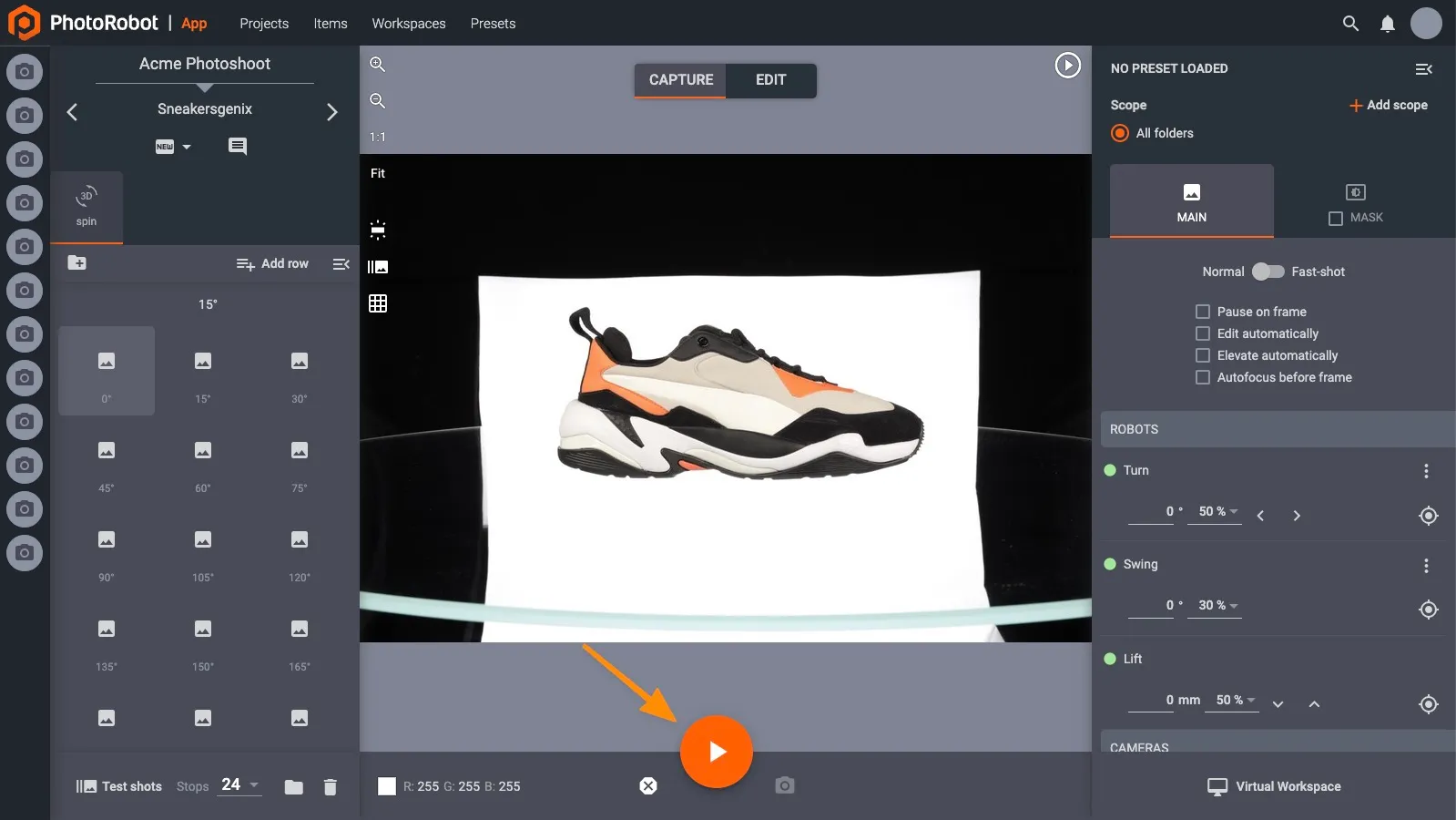
אם יש לך סורק ברקוד, אתה יכול גם להפעיל את הרצף על ידי סריקת ברקוד "התחל" מיוחד. הורד את ברקוד "התחל" של PhotoRobot באינטרנט, והדפיס אותו כדי להשתמש בתכונה זו.

תדע שהרצף הסתיים בהצלחה אם כל התמונות הממוזערות בצד שמאל התמלאו בתמונות. זה תרגול טוב לשים לב לכל טעויות פוטנציאליות של אורות הסטרוב.
אם אחת מהתמונות הממוזערות כהה יותר בהשוואה לאחרות, הנמך את מהירות הסיבוב או, במידת הצורך, בדוק את מצב האורות. לאחר מכן תוכל לסמן תמונות אלה ולצלם אותן מחדש מבלי להפעיל שוב את הרצף כולו.
לאחר השלמת רצף הלכידה, באפשרותך לעבור למצב עריכה, שבו תבצע לאחר העיבוד.
PhotoRobot פקודות מאקרו
פקודות מאקרו ב- CAPP מאפשרות למשתמשים להגדיר פקודות עבור תהליך הלכידה של פריט והתיקיות שלו (spin, stills וכו '). פקודות יכולות לחול על תיקיות בודדות או מרובות, להפעיל רצפים, עריכות תמונה, סביבות עבודה, קביעות מוגדרות מראש, להעתיק קביעות תמונה ולהזיז קביעות תמונה. משתמשים יכולים גם להתאים אישית פקודות מאקרו לפי שם, ברקוד, תג או הערות.
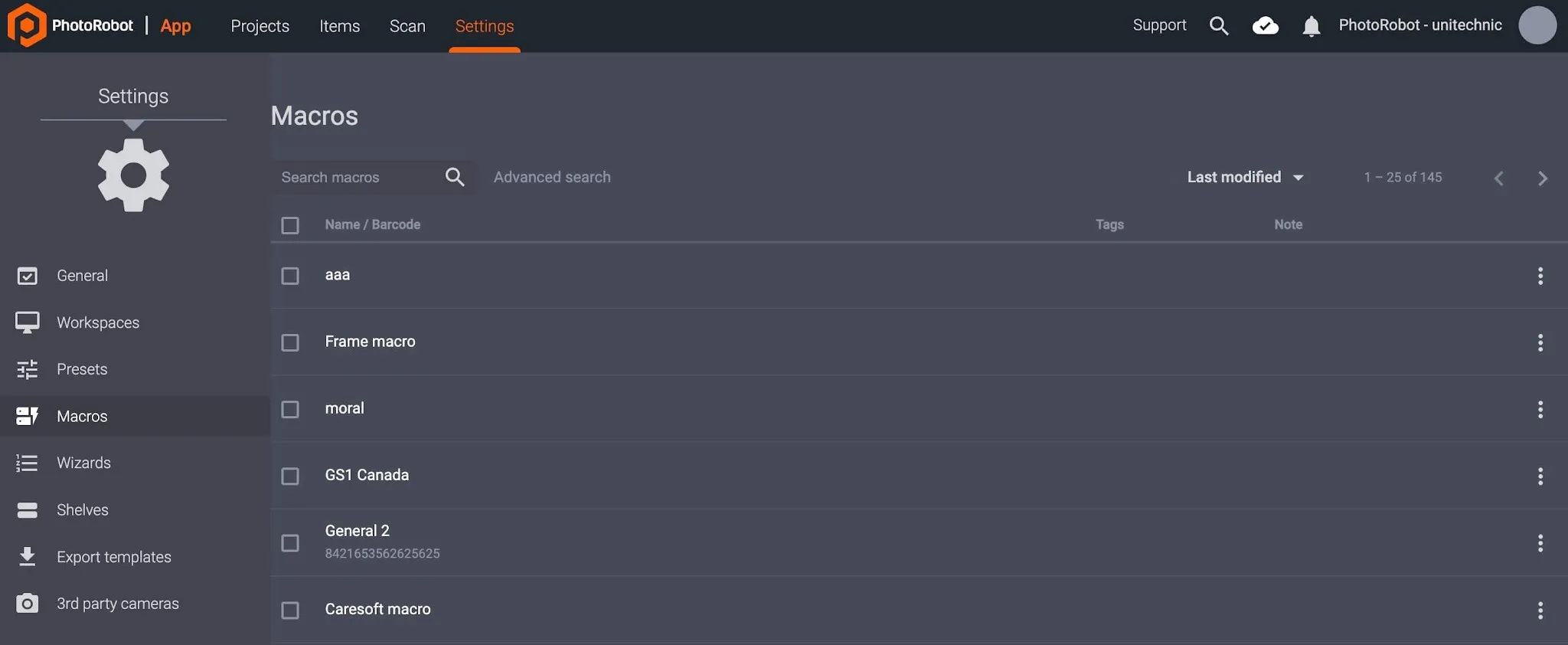
הערה: להוראות מפורטות על התצורה והשימוש במאקרו של PhotoRobot, עיין במדריך למשתמש של מאקרו PhotoRobot. גלה כיצד מאקרו מאפשרים אוטומציה של צילום קסם על פני תיקיות ורכיבים מרובים, עם עיבוד אוטומטי של משימות מורכבות.
מצב אשפים של PhotoRobot
מצב אשפים ב-CAPP מתפקד כחלופה לתצורת חומרה, מצלמה ורצף ידנית. בשימוש, מצב אשפים מאפשר למנהל או לצלם ליצור אשפים שונים כדי לפשט את מצב הצילום עבור מפעילי קו ייצור. מפעיל יכול אז להפעיל את CAPP במצב אשפים, המתפקד כממשק פשוט ביותר עם שלבים מודרכים על ידי אשף. יש גם פקדים מוגבלים לנוחות השימוש וההטמעה.
לאחר יצירת אשף, הוא שומר הגדרות קבועות מראש ותצורות סביבת עבודה, כמו גם שלבים מוגדרים מראש שאותם המפעילים חייבים לבצע. המפעילים אינם יכולים להתאים הגדרות כלשהן, והם חייבים להשלים את ההוראות בכל שלב לפני שהם יכולים לעבור לתהליך הבא.
הערה: שלבי אשף מוגדרים בפורמט שפה דמוי JavaScript, ונכתבים על ידי יועצי PhotoRobot עבור פונקציונליות מותאמת אישית. משתמשים יכולים גם לכתוב פונקציות בסיסיות עבור ניסויים ראשוניים או הגדרות פשוטות. לתיעוד על התצורה הטכנית ושימוש המפעיל באשפים, עיין ב- מדריך למשתמש של PhotoRobot Wizard Mode.
עריכת ממשק מצב
בצד שמאל של המסך, באפשרותך להוסיף כל מספר של פעולות עריכה:
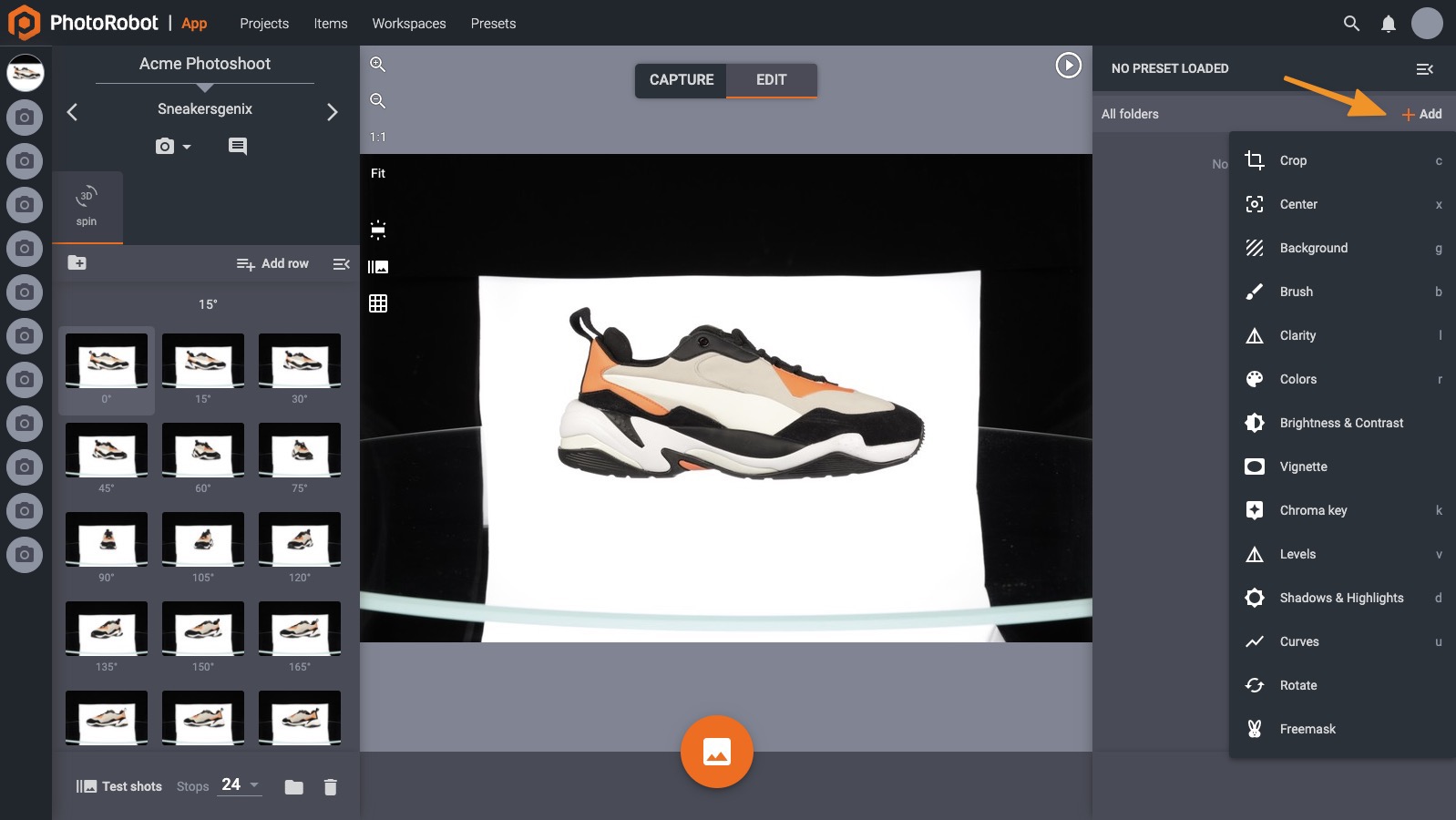
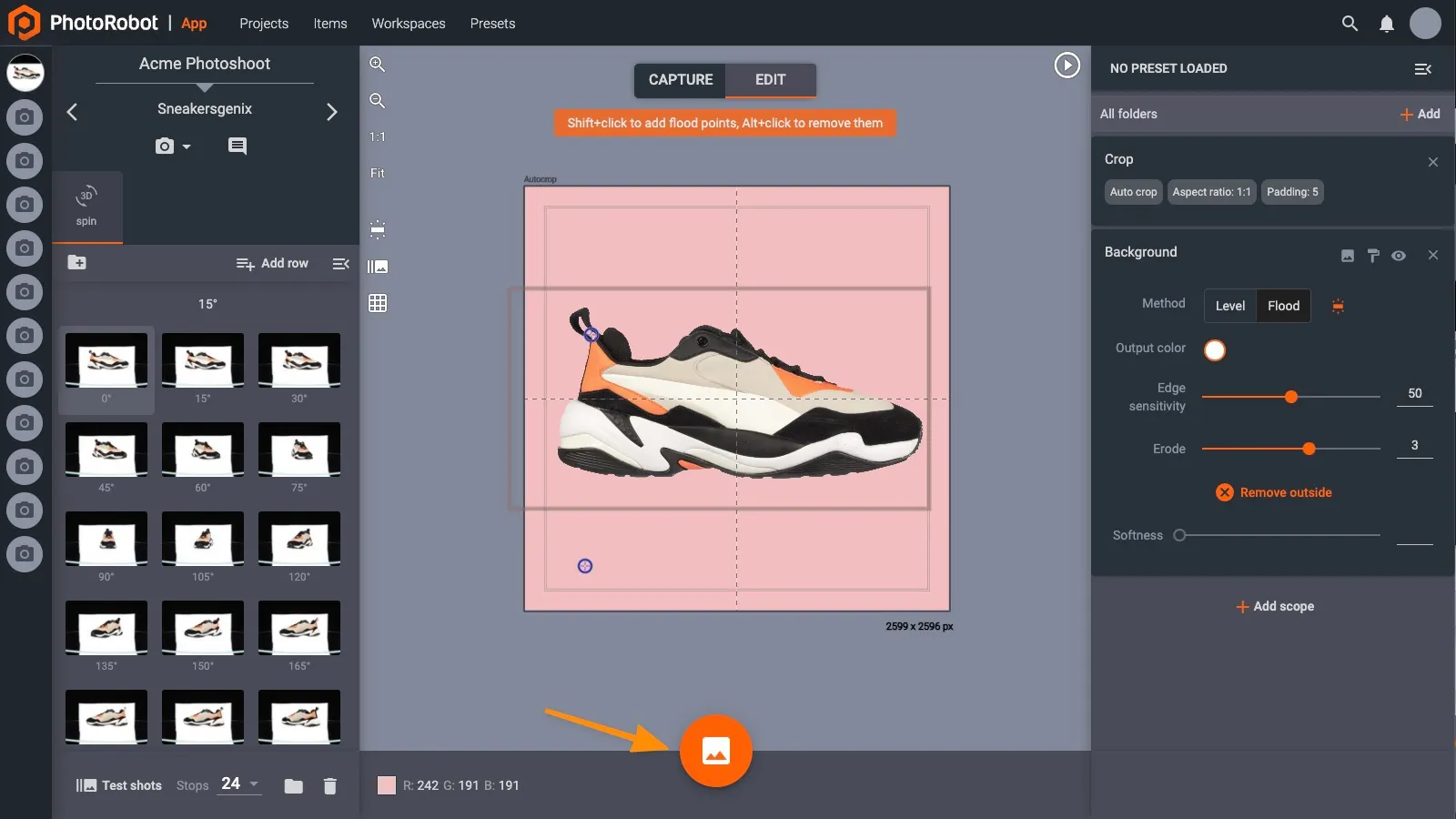
חלק מפעולות העריכה הנפוצות ביותר מפורטות בחלק העליון: חיתוך, מרכז ורקע.
חיתוך אוטומטי
חיתוך - בעת חיתוך תמונות, ישנם שלושה פקדים עיקריים: ההחלפה לחיתוך אוטומטי, יחס גובה-רוחב וריפוד (השולטת בכמות השטח שיש סביב האובייקט המצולם).

מרכז אוטומטי
מרכז - למרות שרוב מכונות PhotoRobot מצוידות בלייזר המסייעים במיקום עצמים על פני השטח, רוב התמונות יזדקקו לריכוז תוכנה נוסף. זה חשוב במיוחד עבור ספינים 360°. בעת תחילת העבודה, מומלץ להשאיר את הפונקציה "מרכז אוטומטי" פועלת, כפי שניתן לראות בתמונה שלהלן:
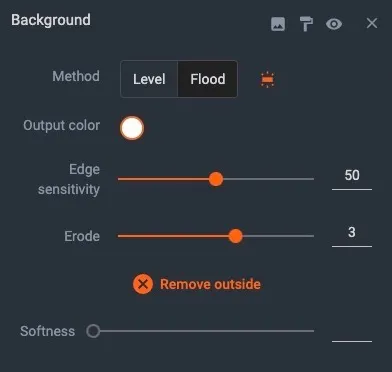
הסרת רקע
פעולת הרקע תתאים את הרקע של תמונה או ערכת תמונות, ותסיר לחלוטין את הרקע אם תרצה. ניתן להשיג תוצאות שונות על ידי שלוש השיטות השונות להסרת רקע ב-CAPP. יש הסרת רקע לפי רמה, הסרת רקע על ידי הצפה ועל ידי מיסוך חופשי.
- הסרת רקע לפי רמה משתמשת בניתוח תוכנה של רמות צבע RGB וערכי בהירות כדי לזהות את הרקע והחזית. זה יתרון בעת צילום פריטים בהירים או לבנים, וכאשר משתמשים ברקע לבן. התאם את הרמות בתוכנה כדי להפוך את בהירות הרקע לעוצמה גבוהה יותר עד שהיא הופכת ללבן טהור. לאחר מכן ניתן להפוך את הרקע לשקוף, או להחליף ברקעים צבעוניים שונים.
- הסרת רקע על ידי הצפה מתפקדת על פי עקרונות דומים להסרת רקע לפי רמה, והיא שימושית לרוב בעת צילום פריטים כהים יותר. הסרת הרקע על ידי פעולת ההצפה הופכת את בהירות הרקע לאינטנסיבית יותר עד שהיא הופכת ללבן טהור סביב הפריט. עם זאת, במקום להתאים את הרמות, הכלי משתמש בנקודה שנבחרה כדי לזהות את הרקע ואז "מציף" את האזור הזה. המשתמשים פשוט לוחצים על נקודה מחוץ לאובייקט המצולם. לאחר מכן התוכנה מזהה את קצוות האובייקט, ומפעילה הצפה כדי למלא את החלל הפנוי סביבו.
- הסרת רקע Freemasking דורשת יותר תצורה מאשר שימוש ברמות או הצפה, אך זו יכולה להיות אחת השיטות המדויקות והמהירות ביותר. שיטה זו משתמשת בתמונת מסכה חתוכה ובתמונה ראשית של המוצר, ומרכיבה את שתי התמונות כדי להסיר את הרקע. לפעמים, זו הדרך היעילה היחידה להסיר את הרקע סביב אובייקטים "קשים" יותר. קחו לדוגמה פריטים מחזירי אור, או חפצים המכילים אזורים עם שטח ריק. מיסוך חופשי מזהה את האובייקט לעומת כל השטח הריק, תוך הסרת הרקע סביב הפריט ובתוכו במידת הצורך. עם זאת, השיטה דורשת תצורה נוספת של אורות סטודיו על מנת ליצור את התמונות הראשיות והמסיכה להסרת רקע.
הערה: זכור שאם CAPP יוכל להסיר את הרקע או לא תלוי בעיקר באופן שבו הסצנה מוארת. אם אינך מצליח למצוא הגדרות שעובדות לשביעות רצונך, צלם מחדש את התמונות עם הגדרות תאורה שונות.
כאשר אתה מרוצה מהגדרות העריכה שלך, החל את הפרמטרים על-ידי לחיצה על לחצן "החל", הממוקם במקום שבו הופיע בעבר לחצן "התחל".
פרסום תמונות
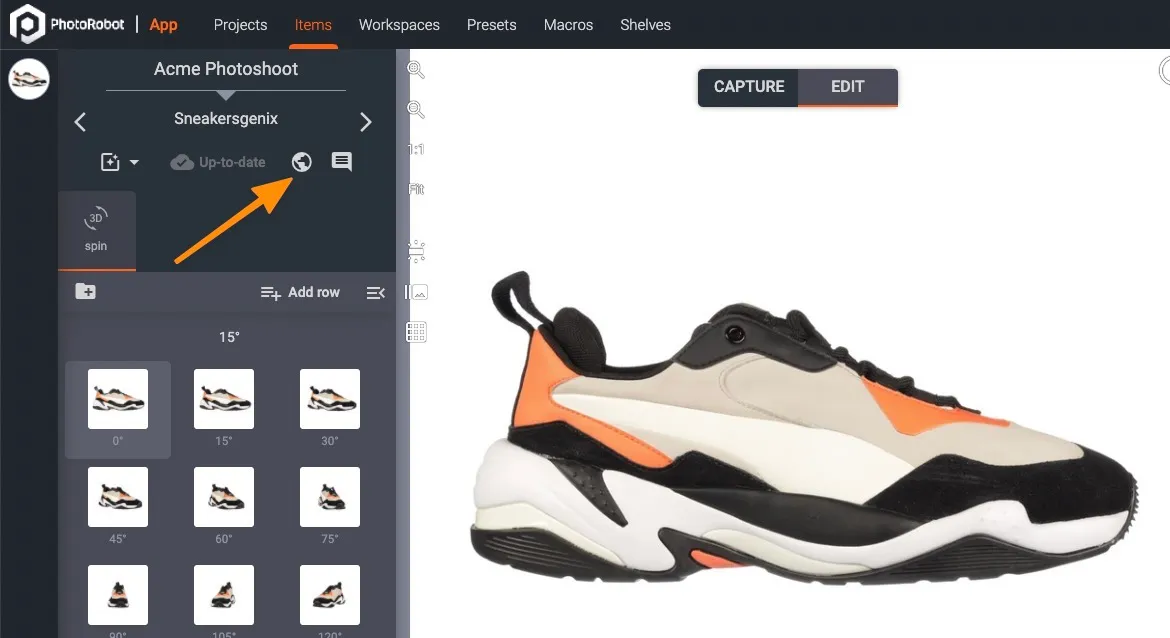
ברגע שפס ההתקדמות מגיע לסיומו, העריכות שלך הוחלו בהצלחה על התמונות שלך. אם אתה משתמש ב- CAPP ללא שירותי ענן PhotoRobot, התמונות המתקבלות שלך מאוחסנות במבנה תיקיות בכונן המקומי שלך.
בעת שימוש באירוח PhotoRobot Cloud, ניתן למצוא קבצים גם באחסון הענן PhotoRobot. כדי לגשת אליהם, לחץ על פתח בענן במקטע תמונות בחלק הימני העליון של המסך.
ייצוא תמונות
כדי לייצא פריט מ- CAPP, משתמשים יכולים לייצא לדיסק מקומי, או לייצא לענן PhotoRobot. ייצוא פריטים מאפשר להגדיר פריטים בעזרת מוסכמות מותאמות אישית למתן שמות, לציין תבנית תמונה, רזולוציה ומשתני תבנית שונים של שמות קבצים.
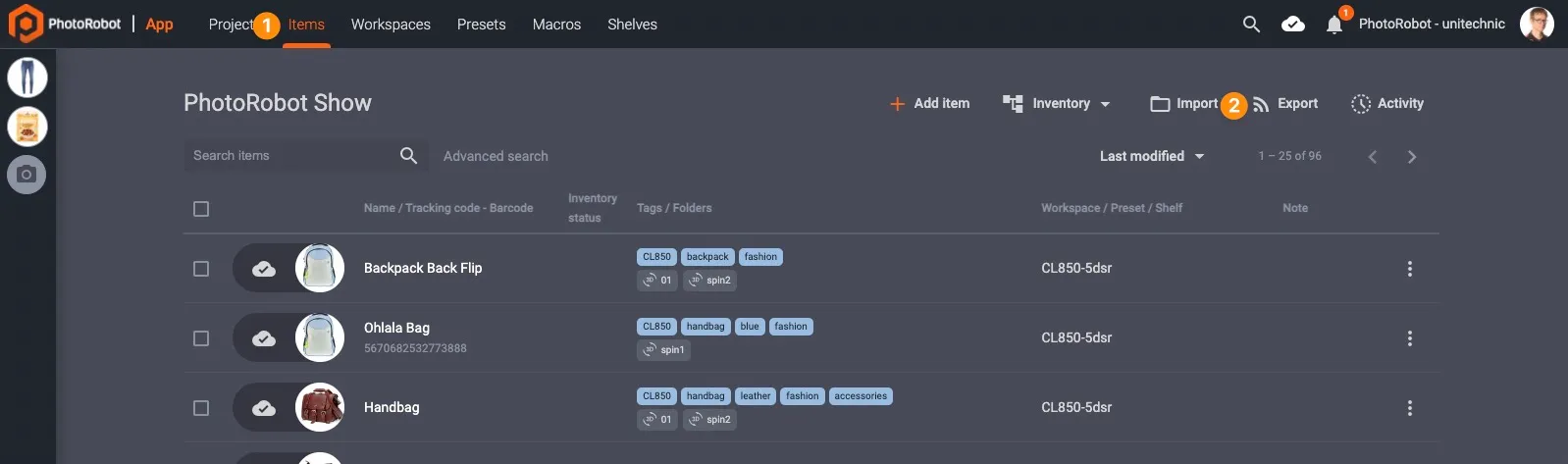
כדי לגשת להגדרות ייצוא פריטים, עבור אל המקטע פריטים ולחץ על יצא בתפריט שמעל לרשימת הפריטים:
החלון הבא ייפתח ויאפשר לך לשנות את הגדרות הייצוא:
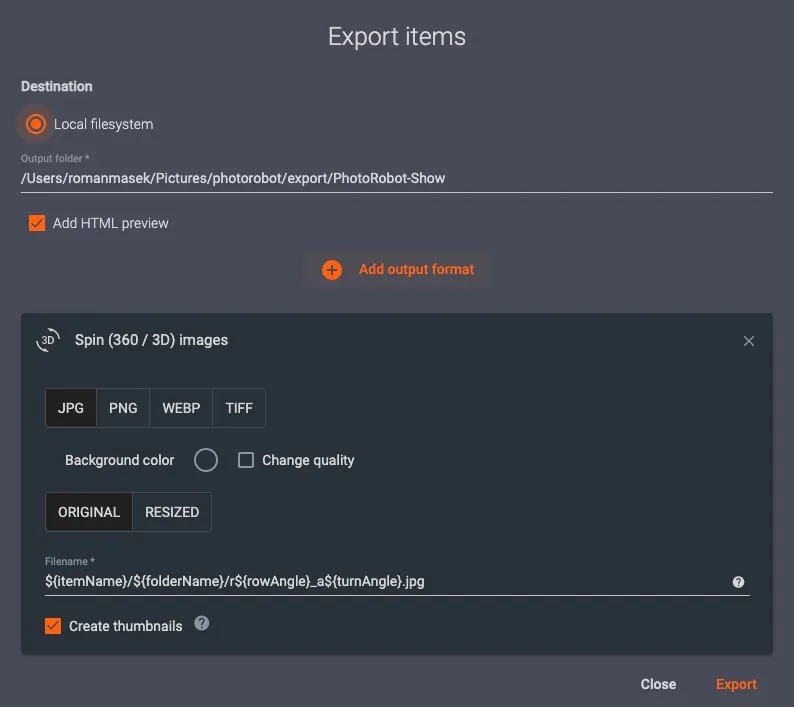
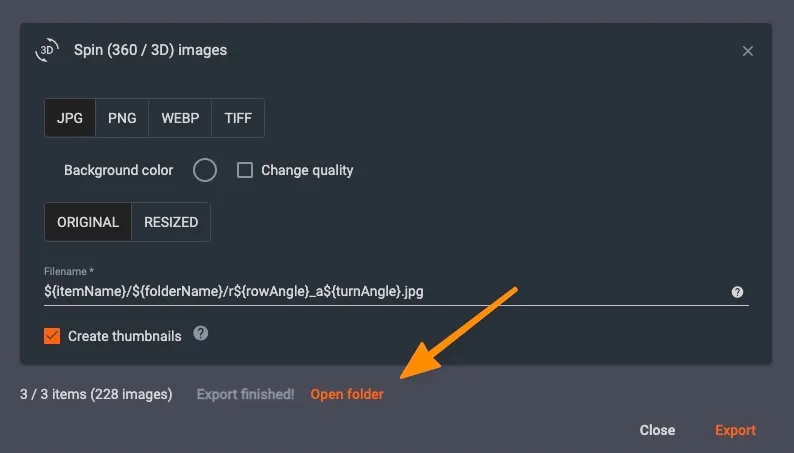
הפעל את תהליך הייצוא על-ידי לחיצה על לחצן ייצוא בפינה השמאלית התחתונה של חלון זה.
כאשר מד התקדמות הייצוא הגיע לסיומו, באפשרותך ללחוץ על פתח תיקיה כדי לגשת לתמונות המיוצאות שלך.
פרסם באמצעות ענן
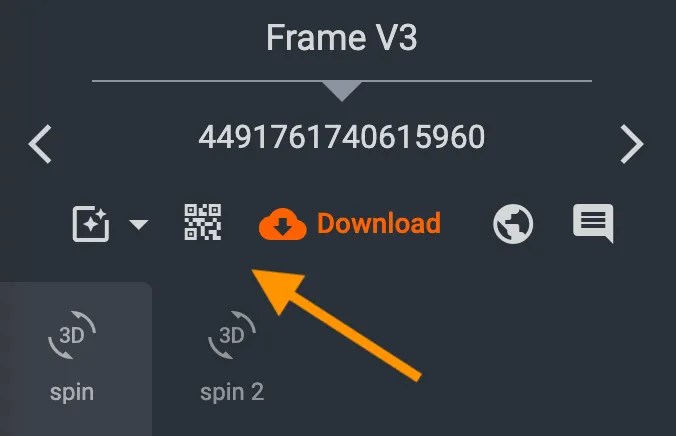
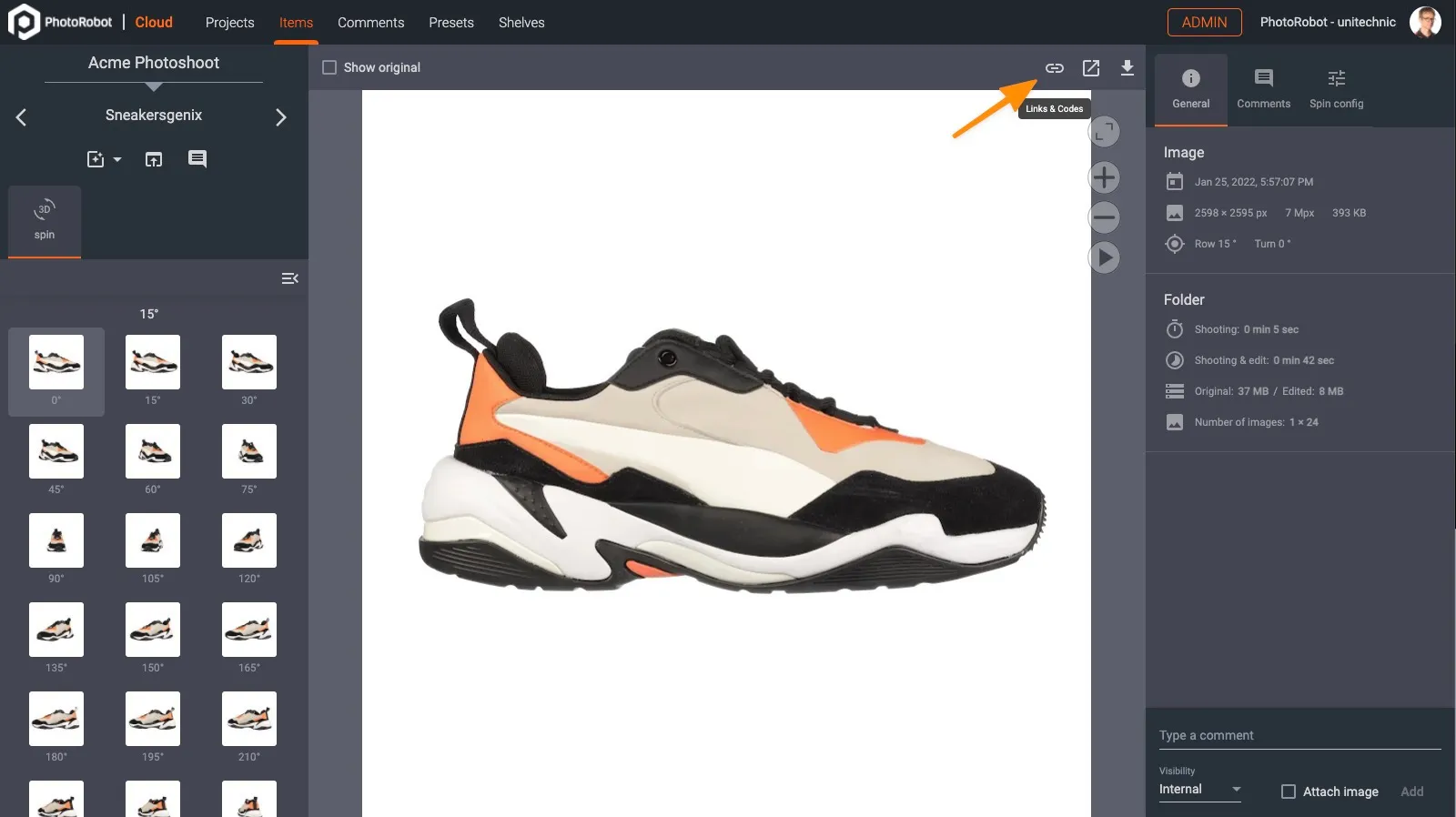
אם פרסום באמצעות שירותי ענן PhotoRobot, פתח תחילה את הפריט בענן. הממשק מציג את התמונה שנלכדה. לחץ על לחצן קודים וקישורים:
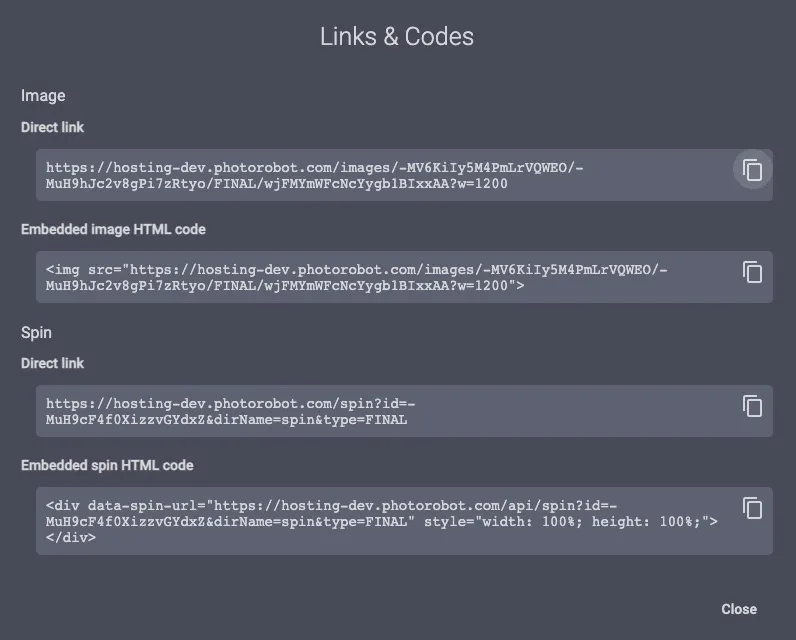
העתק את הקישור הישיר והדבק אותו בדפדפן שלך כדי להציג את התמונה או את הסיבוב. אם אתה מרוצה, העתק את קוד ה - HTML המסתובב המוטבע . הדבק קוד זה בדף שלך כדי להטביע את הסיבוב לתצוגה.


סדרת EOS Rebel


סדרת EOS DSLR


סדרת EOS M ללא מראה


סדרת PowerShot


תקריב / כף יד

סדרת Canon EOS Rebel מציעה מצלמות DSLR ידידותיות למתחילים עם איכות תמונה יציבה, פקדים אינטואיטיביים ותכונות רב-תכליתיות. מצלמות אלה, האידיאליות לחובבי צילום, מספקות מיקוד אוטומטי אמין, מסכי מגע בזוויות משתנות והקלטת וידאו באיכות Full HD או 4K.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS DSLR מספקת תמונות באיכות גבוהה, מיקוד אוטומטי מהיר ורב-תכליתיות, מה שהופך אותה לאידיאלית הן לצילום והן להפקת וידיאו.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS M Mirrorless Series משלבת עיצוב קומפקטי עם ביצועים דמויי DSLR. מצלמות אלה, הכוללות עדשות מתחלפות, מיקוד אוטומטי מהיר וחיישני תמונה באיכות גבוהה, נהדרות למטיילים וליוצרי תוכן המחפשים ניידות מבלי להתפשר על איכות התמונה.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon PowerShot מציעה מצלמות קומפקטיות וידידותיות למשתמש עבור יורים וחובבים מזדמנים. עם דגמים הנעים בין מצלמות פשוטות לכוון ולצלם זום מתקדמות, הן מספקות נוחות, איכות תמונה יציבה ותכונות כמו ייצוב תמונה ווידאו 4K.
חיבור
רזולוציה (MP)
רזולוציה
מצלמות התקריב וכף היד של Canon מיועדות לצילום ווידאו מפורטים מקרוב. הם קומפקטיים וקלים לשימוש, ומציעים מיקוד מדויק, הדמיה ברזולוציה גבוהה ויכולות מאקרו רב-תכליתיות - מושלם עבור ולוגים, צילומי מוצרים ותקריבים יצירתיים.


