הגדרת סביבת עבודה PhotoRobot
מדריך המשתמש הבא מתאר את השלבים להגדרת סביבת עבודה ביישום PhotoRobot Controls (להלן "CAPP"). סביבת עבודה היא רשימת חומרה שתשמש לצילום ספציפי. היא יכולה לכלול מודולים שונים של PhotoRobot, מצלמות, אורות ואביזרים אחרים.
הערה: אם עדיין לא התקנתם והכרתם את CAPP, עיינו ב-תחילת העבודה עם PhotoRobot לקבלת סקירה כללית של התוכנה, תצורתה ושימושיה. המידע במדריך למשתמש זה נועד לתמוך בלקוחות שכבר רכשו הבנה כללית של התוכנה.
כמו כן, למטרות הדגמה, שימו לב שניתן לעבוד עם סביבת עבודה לדוגמה מוגדרת מראש, המוגדרת לשימוש בחומרה וירטואלית. סביבת עבודה לדוגמה מאפשרת למשתמשים להתנסות בתכונות שונות ב-CAPP על ידי בחירת רובוטים ומצלמות וירטואליים.
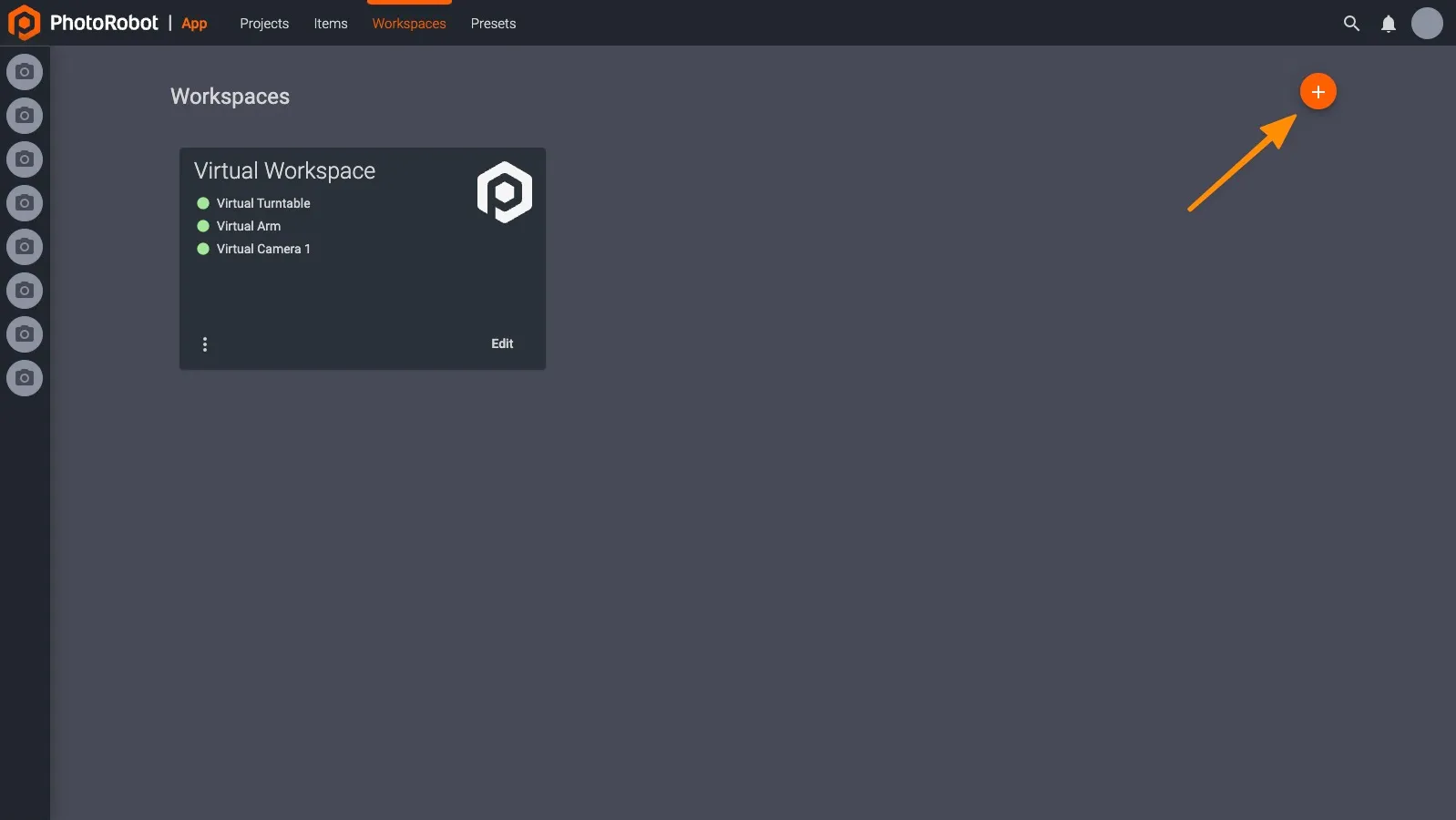
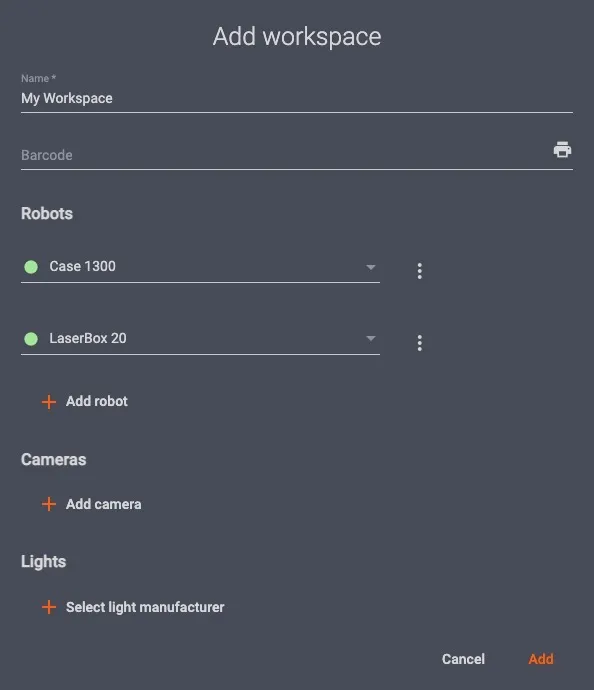
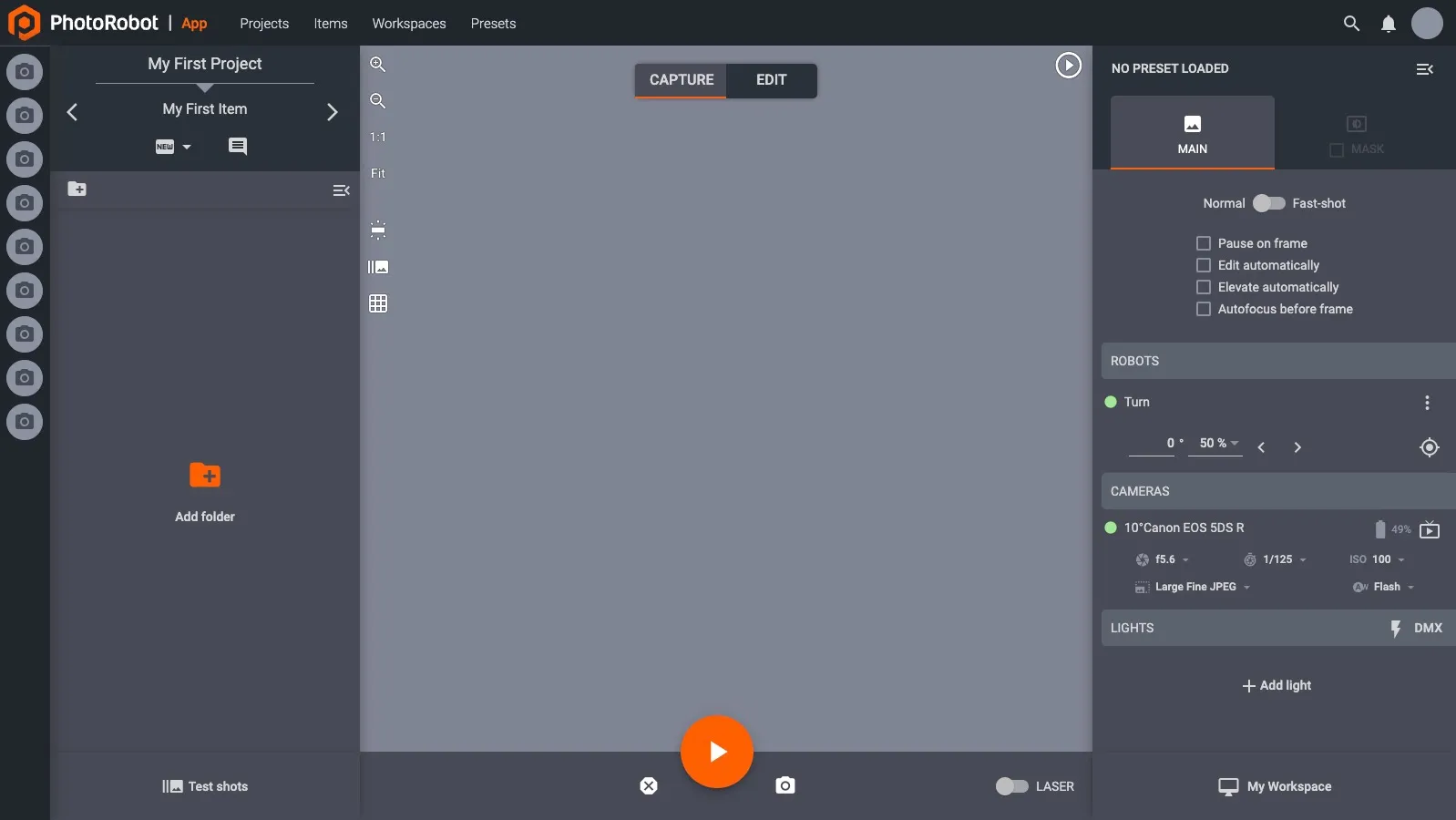
כדי ליצור סביבת עבודה, עבור אל Workspaces ב-CAPP, ולאחר מכן הקש על כפתור היצירה (+).
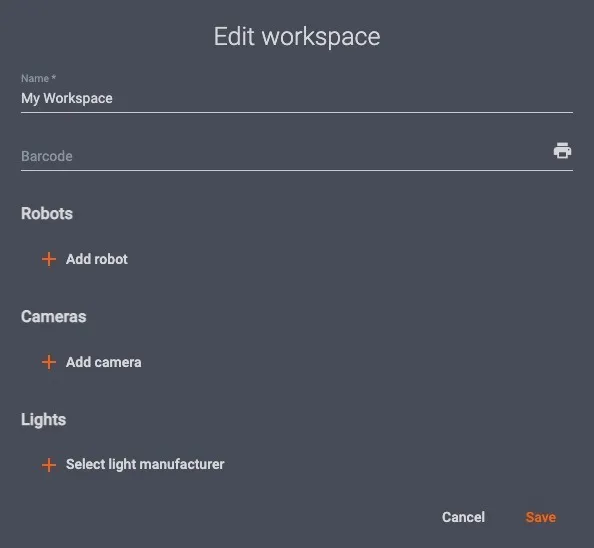
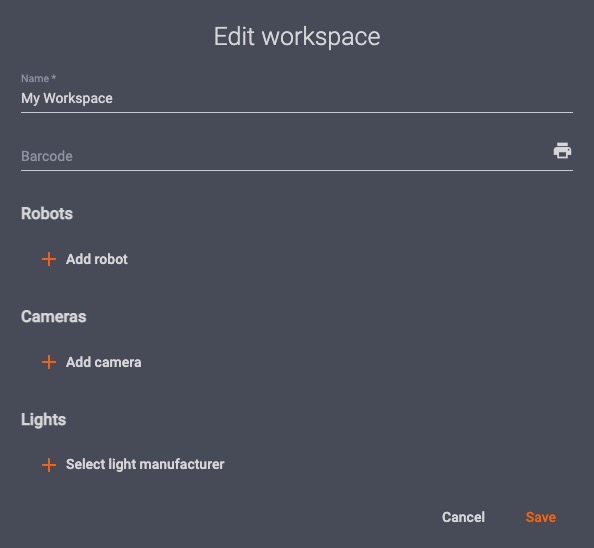
לחיצה על כפתור היצירה תפתח את תפריט סביבת העבודה 'עריכה' שבו ניתן הוסף רובוט, הוסף מצלמה, ו-בחר יצרן תאורה.
שים לב שלאחר חיבור חומרת (או מצלמה) לסביבת עבודה, תוכל לראות מיד אם היא מקוונת (מוכרת על ידי CAPP). כדי לעשות זאת, בדוק את צבע הנקודה משמאל לשם הציוד הנתון. אם ההתקן מזוהה, תהיה נקודה ירוקה.

לחלופין, נקודה אפורה מסמלת שהחומרה לא זוהתה, או שהיא אינה מופעלת. אם יש נקודה אדומה, קיימת שגיאה, כגון שהמשתמש לא העביר את המצלמה למצב ידני. כדי לזהות את סיבת השגיאה, רחף עם העכבר מעל הנקודה האדומה כדי להציג תיאור של השגיאה המתרחשת.
לבעיות נפוצות ופתרונותיהן, אנא עיין ב-מדריך פתרון בעיות של PhotoRobot.
הוסף רובוט
בשלב הבא, ודא שכל הרובוטים לצילום מופעלים ומחוברים לאותה רשת תקשורת מקומית כמו המחשב שלך. לאחר מכן לחץ על הוסף רובוט.
- לחץ על הוסף רובוט כדי לראות רשימה של רובוטים זמינים.
- בחר את הרובוטים שבהם תשתמש מהרשימה.
קביעת תצורה של צילום מהיר
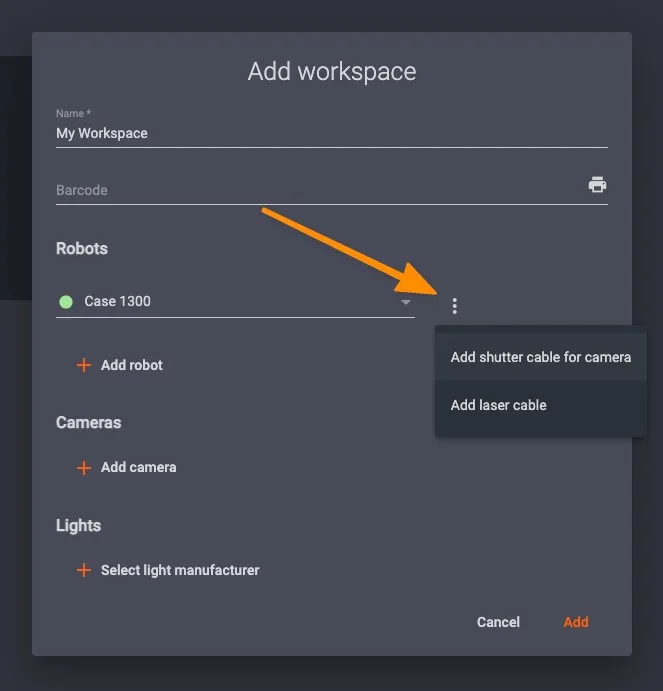
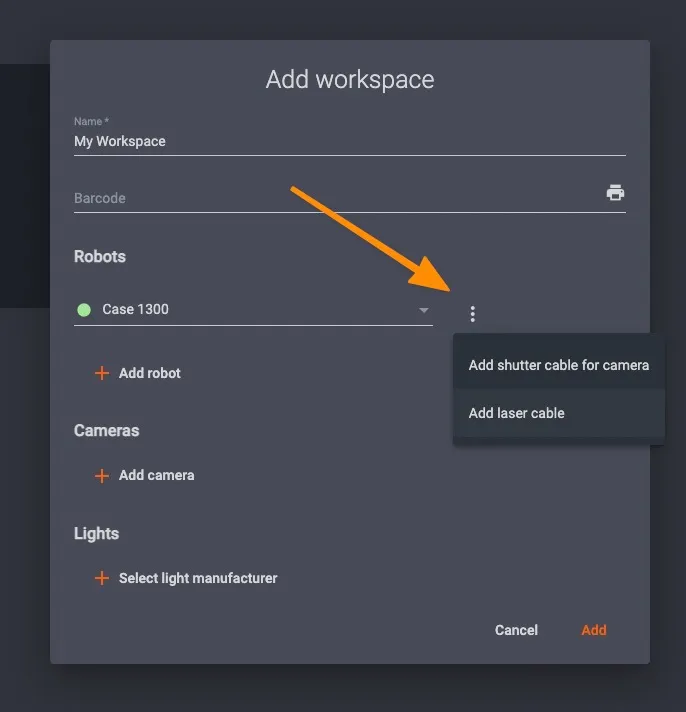
כדי להפעיל מצב צילום מהיר, חברו את כל הרובוטים באמצעות מצלמה באמצעות כבל תריס.
- לחץ על שלוש הנקודות האנכיות מימין לרובוט כדי לפתוח את תפריט המצלמה.
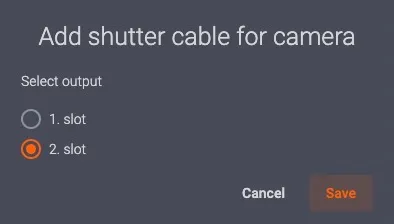
- בחר הוסף כבל תריס למצלמה.
- בחר חריץ פלט (1 או 2). בחר איזה חריץ פלט בהתבסס על החיווט הפיזי של כבל התריס. עבור כבלים PhotoRobot, השתמש בחריץ 2.
( ! ) - עבור יצרנים אחרים, ייתכן שיהיה צורך להשתמש בחריץ 1.
קביעת תצורה של לייזרים
בהתאם לחומרה הנמצאת בשימוש, קיימות מספר אפשרויות לקביעת התצורה של לייזרים:
עבור לייזרים מובנים
הן במקרה 850 והן ב- 1300 יש מערכות לייזר שתוכננו לתוך הרובוט עם תצורה אפסית הנדרשת.
LaserBox עם 20 יציאות
LaserBox בעל 20 יציאות הוא מכשיר עצמאי המאפשר שליטה על לייזרים מרובים באמצעות חיבור רשת. כדי להגדיר את תיבת הלייזר, ודא תחילה שהיא מופעלת ולאחר מכן הוסף אותה כרובוט נוסף לסביבת העבודה:
LaserBox עם 4 יציאות
אם יש לך תיבת לייזר בעלת 4 יציאות המחוברת לרובוט שלך, בחר הוסף כבל לייזר בפריטי תפריט 3 הנקודות מימין למזהה הרובוט:
הוספת מצלמות
כדי להוסיף מצלמה, תחילה ודא שההתקן מופעל ומחובר באמצעות USB למחשב. אם אינך משתמש ברובוט עם יכולת נדנדה (למשל הזרוע הרובוטית או המסגרת), תצטרך גם להגדיר את הזווית שבה המצלמה תכוון את השולחן.
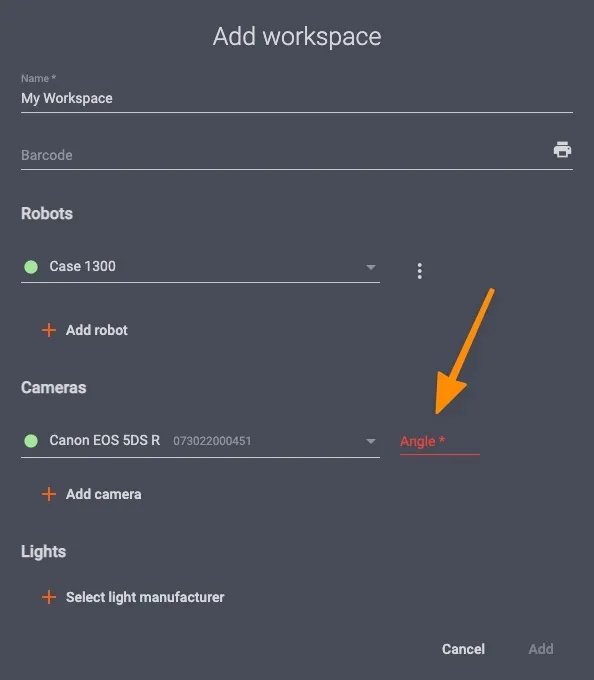
( ! ) - הגדרת הזווית לרובוטים ללא יכולת נדנוד נחוצה עבור תכונות מסוימות כגון מרכוז אוטומטי כדי לפעול.
( * ) - ראו את הרשימה המלאה של מצלמות תואמות PhotoRobot.
קביעת תצורה של אורות
מערכות תאורה התואמות PhotoRobot כוללות שני סוגי נורות: נורות מהבהבות של FOMEI וברונקולור, או כל נורות LED עם תמיכה ב-DMX. כדי להגדיר הגדרת תאורה בתפריט סביבת העבודה, עבור אל אורות והוסף אורות תואמים תחת בחר יצרן תאורה.
אורות מבזק - Broncolor
כדי להגדיר נוריות ברוקולור, בחר תחילה את BRONCOLOR ולאחר מכן בחר מתוך קבוצת האורות Studio שברצונך לשלוט בה:
פנסי סטרובו - FOMEI
עבור אורות על-ידי FOMEI, למשתמשים יש שתי אפשרויות בקרה:
מקלט-משדר LAN של FOMEI (שיטה מועדפת)
לשליטה על אורות באמצעות מקלט-משדר FOMEI LAN, ודא תחילה שהוא מקוון ומחובר לרשת שלך.
לאחר מכן, בחר LAN. לאחר מכן, מתחת ל-LAN בתפריט הנפתח, בחר Fomei LAN Transceiver.

דונגל USB FOMEI (מורשת)
ניתן גם לשלוט באורות באמצעות פלאג WiFi של FOMEI המחובר ישירות למחשב באמצעות USB.
( ! ) שים לב ששיטה זו אינה מומלצת עוד. הסיבה לכך היא העובדה שהיא דורשת התקנת מנהלי התקנים נוספים במחשב שלך. FOMEI גם אינו תומך עוד במערכות MacOS חדשות יותר.
נורות לד - DMX
כדי לשלוט בנורות LED התואמות לפרוטוקול DMX, חבר את האורות באמצעות כבל RJ45 או USB לרובוט.
לאחר מכן באפשרותך לבחור DMX של יצרן האור.
מאוחר יותר, תיצור אור בודד במסך הלכידה:
עבור כל תאורה, ניתן להגדיר שני ערוצים:

- ערוץ הבהירות מאפשר שליטה על רמת הבהירות של האור שנבחר.
- ערוץ הצבע נתמך על-ידי נורות מסוימות ומאפשר התאמה של רמות הצבע.


סדרת EOS Rebel


סדרת EOS DSLR


סדרת EOS M ללא מראה


סדרת PowerShot


תקריב / כף יד

סדרת Canon EOS Rebel מציעה מצלמות DSLR ידידותיות למתחילים עם איכות תמונה יציבה, פקדים אינטואיטיביים ותכונות רב-תכליתיות. מצלמות אלה, האידיאליות לחובבי צילום, מספקות מיקוד אוטומטי אמין, מסכי מגע בזוויות משתנות והקלטת וידאו באיכות Full HD או 4K.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS DSLR מספקת תמונות באיכות גבוהה, מיקוד אוטומטי מהיר ורב-תכליתיות, מה שהופך אותה לאידיאלית הן לצילום והן להפקת וידיאו.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS M Mirrorless Series משלבת עיצוב קומפקטי עם ביצועים דמויי DSLR. מצלמות אלה, הכוללות עדשות מתחלפות, מיקוד אוטומטי מהיר וחיישני תמונה באיכות גבוהה, נהדרות למטיילים וליוצרי תוכן המחפשים ניידות מבלי להתפשר על איכות התמונה.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon PowerShot מציעה מצלמות קומפקטיות וידידותיות למשתמש עבור יורים וחובבים מזדמנים. עם דגמים הנעים בין מצלמות פשוטות לכוון ולצלם זום מתקדמות, הן מספקות נוחות, איכות תמונה יציבה ותכונות כמו ייצוב תמונה ווידאו 4K.
חיבור
רזולוציה (MP)
רזולוציה
מצלמות התקריב וכף היד של Canon מיועדות לצילום ווידאו מפורטים מקרוב. הם קומפקטיים וקלים לשימוש, ומציעים מיקוד מדויק, הדמיה ברזולוציה גבוהה ויכולות מאקרו רב-תכליתיות - מושלם עבור ולוגים, צילומי מוצרים ותקריבים יצירתיים.


