מדריך משתמש לפלטפורמת סיבוב - סטנדרטי, HT / RotoPower

מדריך משתמש זה נועד לתמוך בהפעלת ה-PhotoRobot TURNING PLATFORM. המידע מכסה הן את הגרסה הסטנדרטית של המכשיר, והן את גרסת ה-TURNING PLATFORM High Torque (HT) / RotoPower. ישנה סקירה כללית של המערכת, עם תיאורים של רכיבי המערכת, אביזרים והרחבות. מטרתו היא להקל על הבנה כללית של תחנת העבודה, בדיקות בסיסיות, שימוש ראשוני ותפעול רציף של PhotoRobot.
חשוב: ההתקנה הראשונית של מערכת PhotoRobot חייבת תמיד להתבצע על ידי רשות מוסמכת של PhotoRobot. רשויות עם אישור להתקין את PhotoRobot הן מפיץ מאושר, או נציג היצרן עצמו.
הערה: יש לעיין תמיד במידע והוראות בטיחות של PhotoRobot בנוסף למדריך המסופק במיוחד עם המכשיר שלך לפני השימוש הראשון.
פלטפורמת סיבוב PhotoRobot - סטנדרט & HT / RotoPower
תודה ומזל טוב על רכישת פלטפורמת הסיבוב PhotoRobot. פלטפורמת הסיבוב מייצגת עשרות שנים של ניסיון ישיר וחדשנות בטכנולוגיית צילום אוטומטי. וכמו כל מערכות PhotoRobot, המכשיר מותאם לצרכים הייחודיים של העסק שלך. הוא פועל עם אביזרים מגוונים, והוא תואם בשילוב עם רובוטי הרחבה כמו הזרוע הרובוטית והקוביה. ועוד יותר טוב, PhotoRobot מספקת אקוסיסטם מצוין של פתרונות מוכנים ללקוחות PhotoRobot, ומבטיחה תוצאות מרשימות – בקלות, במהירות ובעקביות. ברוכים הבאים לסטודיו המופעל על ידי PhotoRobot.
1. תיאור המוצר - פלטפורמת סיבוב
פלטפורמת הסיבוב היא שולחן סיבוב צילום כבד וממונע שמסובב אובייקטים קטנים לגדולים, קלים וכבדים לצילום 360. הוא זמין בשתי גרסאות: הגרסה הסטנדרטית של פלטפורמת הסיבוב, ו-Turning Platform HT / RotoPower.
בהשוואה, גרסת HT / RotoPower של פלטפורמת הסיבוב כוללת ספק כוח בחלק המסתובב של הפלטפורמה. שקע החשמל מאפשר לחבר מכשירים חשמליים ולהדליק פריטים בזמן שפלטפורמת הסיבוב פועלת.
במקביל, שתי הגרסאות של פלטפורמת הסיבוב כוללות עיצוב חזק ותומכות במגוון רחב של אביזרים המשמשים כפתרון אוניברסלי לצילום פטיפון. במקביל, בקרות מונעות תוכנה מסנכרן סיבוב חלק של הפטיפון עם צילום מצלמה ותאורת אולפן כדי לאוטומציה של צילום ועיבוד לאחר מכן.

המפרטים הטכניים והתכונות המרכזיות של פלטפורמת הסיבוב כוללים:
- קוטר גודל פלטת סיבוב עד 280 ס"מ (9.2 רגל) לאובייקטים קטנים עד גדולים.
- קיבולת נשיאה של עד 1,500 ק"ג (3,307 ליברות).
- תיבת הילוכים ללא מרווח עם הספק מומנט גבוה.
- תמיכות אמינות מבטיחות יציבות של לוח הסיבוב, ללא תנועה כאשר היא נעצרת.
- רמפה לגישה נוחה לפטיפון (כמו לאופנועים).
- גרסת HT / RotoPower הניתנת לשינוי למסלול הווירטואלי לצילום וצילום דוגמניות חיות.
- התקנה אופציונלית עם הרחבת מנוע Robotic Arm V8 ומתקני בובה.
- מגוון רחב של אביזרים לצילום פטיפון.
- בקרות מונעות תוכנה עבור תחנת העבודה הרובוטית, המצלמות, התאורה והפוסט-פרודקשן.
1.1. אינטגרציה עם סטודיו - פלטפורמת סיבוב
בשימוש באולפן, פלטפורמת הסיבוב תומכת בצילום אוטומטי של פריטים קטנים עד גדולים במשקל של עד 1,500 ק"ג (3,307 ליברות). זה כולל בעיקר פריטים ממכשירי חשמל ורהיטים לבית, טרקטורים, מכונות וכלי רכב קטנים. רמפות קטנות מספקות גישה נוחה לפטיפון, בעוד שתיבת הילוכים ללא מרווח מבטיחה סיבוב חלק של הפטיפון לכל עצם.
ישנם ארבעה גדלי לוחות זמינים: 2.8 מ' (9.2 רגל); 2.6 מ' (8.5 רגל) × 2 מ' (6.6 רגל); 1.8 מטר (5.9 רגל); 1.0 מטר (3.3 רגל). במקביל, פלטפורמת הסיבוב ניתנת לשילוב עם הרחבת הזרוע הרובוטית לצילום מהיר יותר במספר שורות וסיבוב 360 של מוצרים גדולים.
אם משתמשים בפלטפורמת הסיבוב HT / RotoPower, הפלטפורמה ניתנת גם לשינוי למסלול המסלול הווירטואלי האינסופי לצילום וצילום דגמים חיים
1.2. סקירת המכשיר של פלטפורמת הסיבוב
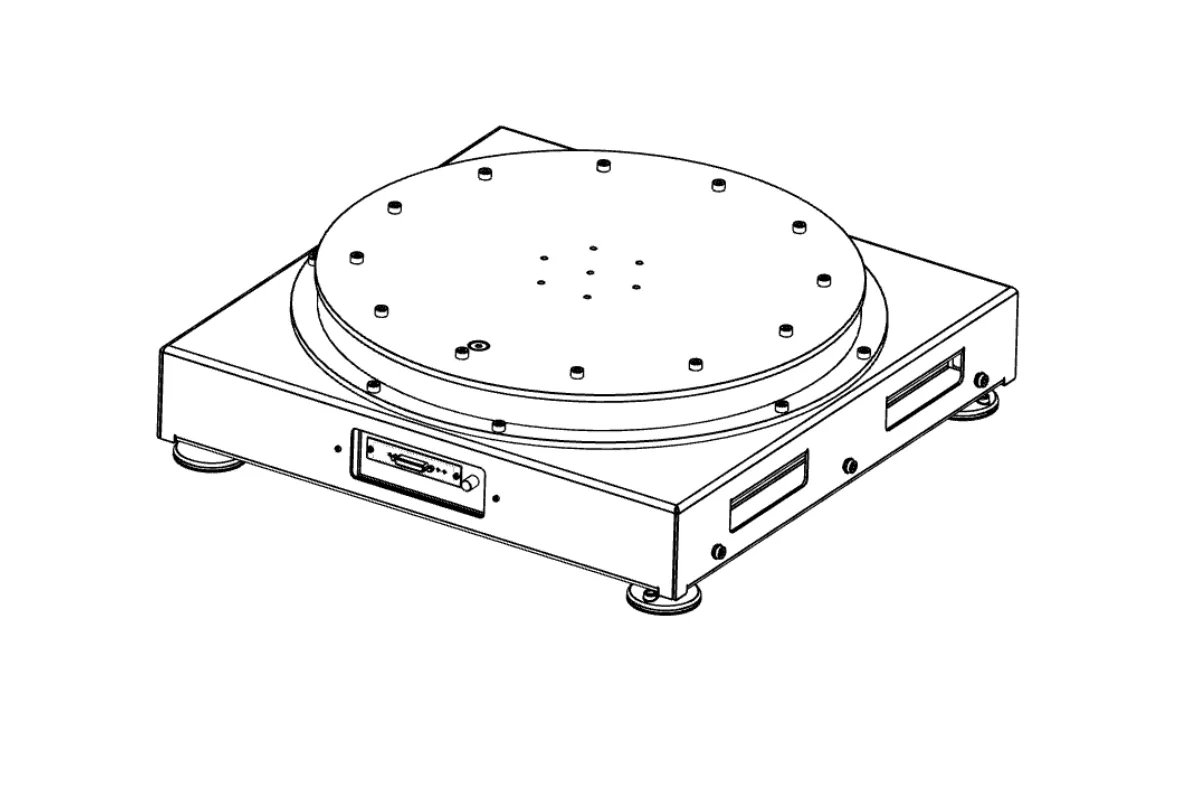
1.2.1. פלטפורמת הסיבוב HT / RotoPower מספקת תיבת הילוכים ללא מרווח וכוח מומנט גבוה להבטחת ביצועים יוצאי דופן. בהשוואה לגרסה הסטנדרטית של פלטפורמת הסיבוב, ל-HT / RotoPower יש ספק כוח בחלק המסתובב של הפלטפורמה. זה מאפשר לחבר מכשירים חשמליים כדי להפעיל אותם תוך כדי צילום הפריט בזמן סיבוב לצילום 360.
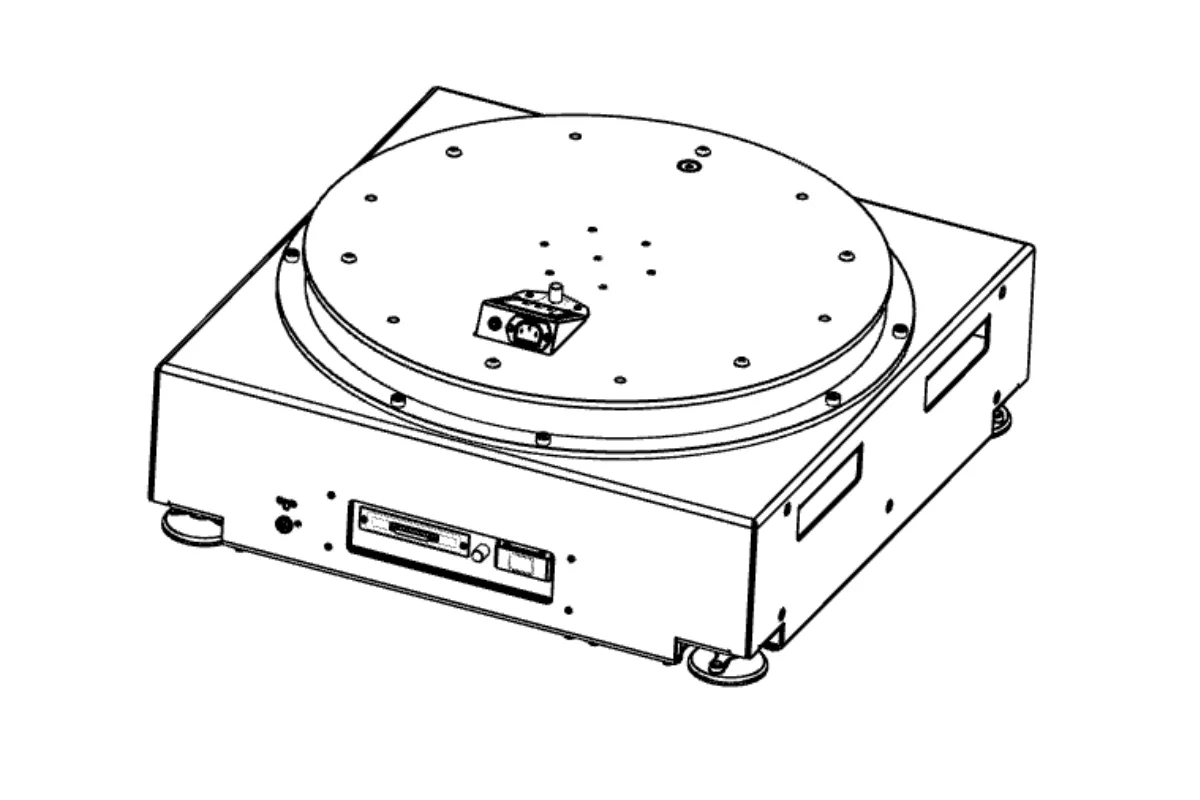
1.2.2. פלטפורמת הסיבוב (הגרסה הסטנדרטית) כוללת לוח ללא ספק כוח בחלק המסתובב. הוא שימושי לצילום פריטים שאינם דורשים כוח במהלך הצילום.
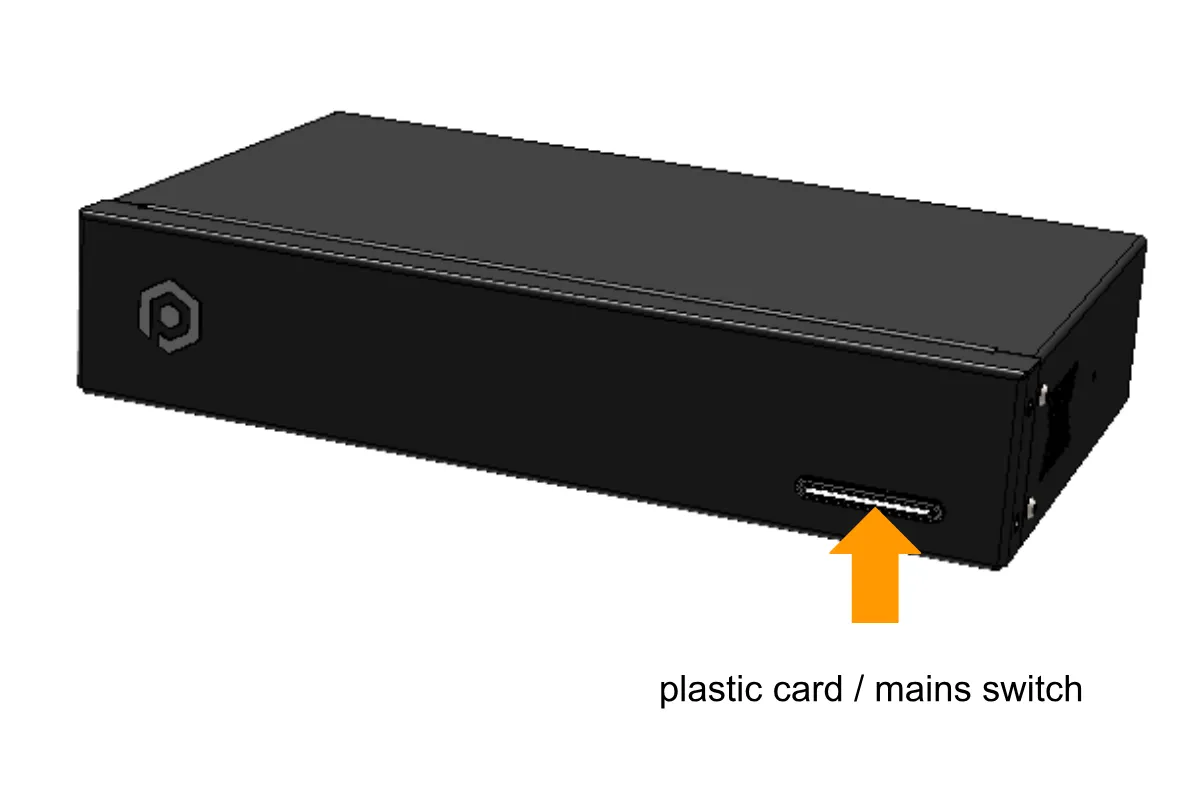
1.2.3. יש לשים לב שיחידת הבקרה היא חלק נפרד אך אינטגרלי ממכונת פלטפורמת הסיבוב, המופעלת ומספקת שליטה על המכשיר. בדרך כלל, יחידת הבקרה ממוקמת בתוך מארז PhotoRobot HD ייעודי שמגיע עם המערכת. יש מתג פלסטיק לכרטיס / חשמל בחזית יחידת הבקרה.
1.3. פלטפורמת סיבוב - הרחבת מסלול וירטואלי
הפיכת פלטפורמת הפנייה למסלול הקטוואול הווירטואלי אפשרית באמצעות פלטפורמת הסיבוב HT / RotoPower. מסלול ההליכה הווירטואלי נכנס למרחב של 7 על 7 מטרים, ומכסה את הדינמיקה הסיבובית של לוח הסיבוב בשילוב עם חגורת ההליכה. יש שני כיווני תנועה: תנועת חגורת הליכון דמוית הליכון, ותנועת הפלטפורמה המסתובבת. שניהם מסוגלים להסתובב בו-זמנית בזמן שהרצועה פועלת כדי לצלם או לצלם דגמים חיים הולכים על המסלול האינסופי.



הערה: למידע נוסף על התצורה והוראות ההפעלה של ה-Catwalk, עיין במדריך למשתמש של PhotoRobot Virtual Catwalk.
1.4. פלטפורמת סיבוב - הרחבת מנוע V8 עם זרוע רובוטית
כתוסף הרחבה אופציונלי, ה-TURNING PLATFORM תואמת ל-ROBOTIC ARM V8 כדי להאיץ צילום שורה בודדת ו-360 של אובייקטים גדולים.

הערה: ה-ROBOTIC ARM תואם לרוב ה-TURNTABLEים והמכשירים הסיבוביים של PhotoRobot, כולל רובוט ה-CUBE. אם משתמשים ב-TURNING PLATFORM או במכשיר PhotoRobot אחר עם ה-ROBOTIC ARM, עיינו ב-מדריך למשתמש של Robotic Arm V8 לתמיכה נוספת.
2. הוראות לשימוש ראשון
לפני השימוש הראשון בפלטפורמת הסיבוב של PhotoRobot, יש להבין את מושג הפתרון. PhotoRobot היא יחידה מודולרית המורכבת מרכיבי חומרה ותוכנה. מבחינה טכנית, זה דורש מ-PhotoRobot להתחבר לאותה רשת כמו מחשב שמפעיל אותו. בנוסף, הרשת חייבת להיות מחוברת לאינטרנט כדי להפעיל שירותי PhotoRobot, הנגישים בענן.
חשוב: עיין תמיד ב- PhotoRobot שימוש ראשון ובדיקות בסיסיות כדי לאשר את דרישות ההפעלה הטכניות, וללקבל הוראות מפורטות לחיבור PhotoRobot לרשת.
2.1. דרישות תפעול בסיסיות
באופן כללי, קיימות דרישות תפעול בסיסיות לפלטפורמת הסיבוב הבאות.
- יחידת הבקרה חייבת להתחבר לרשת המקומית.
- יש צורך במחשב כדי להפעיל את ממשק המשתמש הגרפי של השירות או את התוכנה של המפעיל הנקראת _Controls.
- המחשב חייב להתחבר דרך אותה רשת שאליה מחוברת יחידת הבקרה.
- חייב להיות חיבור אינטרנט פונקציונלי ברשת.

2.2. דרישות הפצת חשמל
לאחר מכן, על המשתמשים לבדוק את פרמטרי מערכת חלוקת החשמל (למשל מתח ותדר). זה דורש בדיקת מחבר RJ45 בגב יחידת הבקרה. אם ההגדרה של יחידת הבקרה אינה עומדת בתקן, הגדר אותה תחילה על ידי מיקום בורר המתח הידני בגב יחידת הבקרה. לאחר מכן, חבר את יחידת הבקרה לרשת דרך כבל אתרנט באמצעות מחבר RJ45.

2.3. דרישות תצורת רשת
יש לעמוד בדרישות תצורת הרשת להפעלת פלטפורמת הסיבוב.
- שרת DHCP ברשת הוא חובה.
- יש לאפשר תקשורת עם יציאות TCP 7777, 7778.
- יש לאפשר שידורי UDP ביציאה 6666.
- חיבור לאינטרנט הוא חובה.
- *. יש לאפשר גישה photorobot.com.
- יש לאפשר גישה as-unirobot.azurewebsites.net.
- מומלץ חיבור קווי של PhotoRobot ל-LAN.
- עיין בדרישות קדם ותצורה של רשת PhotoRobot כדי לוודא הגדרה נכונה ולפתרון בעיות לפי הצורך.
- חבר את תקע החשמל לשקע החשמל.
בסופו של דבר, לחץ על מתג החשמל ביחידת הבקרה. כאשר הסטטוס משתנה, האור ישתנה מאור מהבהב לאור קבוע, מה שמסמן שיחידת הבקרה מוכנה לפעולה.
2.4. מצא את כתובת ה-IP של PhotoRobot ב-LAN
כדי למצוא את כתובת ה-IP של פלטפורמת הסיבוב, השתמש באפליקציות התומכות הבאות כדי לחפש ברשת את PhotoRobot.
- Windows - frfind עבור Windows
- Mac OS X - frfind עבור macOS
- אנדרואיד - PhotoRobot Locator ב-Google Play
- אייפון, אייפד - PhotoRobot Locator ב-iTunes
הערה: לאחר שאיתרת מכשיר PhotoRobot באמצעות אפליקציה תומכת, העתק את כתובת ה-IP. לאחר מכן, הדביק את כתובת ה-IP של PhotoRobot לכל דפדפן אינטרנט בפורמט URL. אם יצליח, יושק ממשק המשתמש הגרפי של השירות, שיציג ממשק משתמש בסיסי לבדיקת PhotoRobot.
2.5. הרצת בדיקות בסיסיות לפלטפורמת הסיבוב
לאחר פתיחת ממשק ה-Service, השתמשו בבקרות ממשק המשתמש הפשוטות כדי להפעיל תחילה את המנוע, ואז לסובב את הפלטפורמה לכל זווית רצויה.

- הפעל את המנועים (חץ 1), נסה לסובב (חץ 2).
- אם לוח הזכוכית מסתובב, מכשיר PhotoRobot Turning Platform שלך מוכן לפעולה רגילה.
3. תוכנת PhotoRobot _Controls
שים לב שתוכנת PhotoRobot Controls App ("CAPP") אינה חלק מאספקת המכונה; זוהי רכישה נפרדת מהמכשיר. הורדת CAPP נגישה דרך חשבון PhotoRobot שלך, בעוד CAPP מספקת שליטה מלאה על ה-Turning Platform, ומכשירי PhotoRobot אחרים. CAPP משלבת שליטה על רובוטים, מצלמות, תאורת סטודיו ופוסט-פרודקשן. זה כולל תכונות לניהול זרימת עבודה וכן את הפונקציונליות הנדרשת לאוטומציה יעילה בעיבוד לאחר הייצור.

הערה: בהפעלה לאחר ההתקנה, שים לב שהממשק עשוי להתחיל אוטומטית במצב "אשף". מצב Wizard הוא ממשק משתמש פשוט שמאפשר רק סריקה של ברקודים כדי לזהות אובייקטים ולהתחיל את רצפי הלכידה והעיבוד באופן אוטומטי.
להוראות מפורטות על התקנה ושימוש בתוכנת PhotoRobot Controls App, עיין במדריך למשתמש PhotoRobot Getting Started.
4. תוויות מידע
4.1. סקירת סמלים

4.2. תוויות מכונה ורכיבים
לתוויות מידע עבור מכונות ורכיבים ספציפיים, עיינו בסעיף תוויות מידע (3.1) מתוך PhotoRobot Safety Information and Instructions.


סדרת EOS Rebel


סדרת EOS DSLR


סדרת EOS M ללא מראה


סדרת PowerShot


תקריב / כף יד

סדרת Canon EOS Rebel מציעה מצלמות DSLR ידידותיות למתחילים עם איכות תמונה יציבה, פקדים אינטואיטיביים ותכונות רב-תכליתיות. מצלמות אלה, האידיאליות לחובבי צילום, מספקות מיקוד אוטומטי אמין, מסכי מגע בזוויות משתנות והקלטת וידאו באיכות Full HD או 4K.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS DSLR מספקת תמונות באיכות גבוהה, מיקוד אוטומטי מהיר ורב-תכליתיות, מה שהופך אותה לאידיאלית הן לצילום והן להפקת וידיאו.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS M Mirrorless Series משלבת עיצוב קומפקטי עם ביצועים דמויי DSLR. מצלמות אלה, הכוללות עדשות מתחלפות, מיקוד אוטומטי מהיר וחיישני תמונה באיכות גבוהה, נהדרות למטיילים וליוצרי תוכן המחפשים ניידות מבלי להתפשר על איכות התמונה.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon PowerShot מציעה מצלמות קומפקטיות וידידותיות למשתמש עבור יורים וחובבים מזדמנים. עם דגמים הנעים בין מצלמות פשוטות לכוון ולצלם זום מתקדמות, הן מספקות נוחות, איכות תמונה יציבה ותכונות כמו ייצוב תמונה ווידאו 4K.
חיבור
רזולוציה (MP)
רזולוציה
מצלמות התקריב וכף היד של Canon מיועדות לצילום ווידאו מפורטים מקרוב. הם קומפקטיים וקלים לשימוש, ומציעים מיקוד מדויק, הדמיה ברזולוציה גבוהה ויכולות מאקרו רב-תכליתיות - מושלם עבור ולוגים, צילומי מוצרים ותקריבים יצירתיים.


