PhotoRobot SynchroBox - פונקציונליות ומדריך משתמש להגדרות

התיעוד הבא מתאר את הפונקציונליות וההתקנה של PhotoRobot SynchroBox, ה-Multi-Camera Controller התומך ב-PhotoRobot MultiCam. מידע זה נועד לתמוך בלקוחות PhotoRobot שרכשו לאחרונה מכשיר ומשתמשים ביותר ממצלמה אחת עם PhotoRobot. ה-SynchroBox מתפקד כרכזת מרובת מצלמות המסנכרנת את תריס המצלמה של שתי מצלמות או יותר. קראו קדימה כדי להבין את התיאוריה, הפונקציונליות וההתקנה של ה-SynchroBox כדי לסייע בהבנה בסיסית ובהפעלה ראשונה של המכשיר.
חשוב: ההתקנה הראשונית של מערכת PhotoRobot חייבת להתבצע תמיד על ידי גורם מוסמך של PhotoRobot. גורמים המורשים להתקין PhotoRobot הם מפיץ מאושר, או נציג של היצרן עצמו. בנוסף, יש לעיין תמיד ב-מידע והוראות בטיחות של PhotoRobot יחד עם כל מדריך המסופק במיוחד עם המכשיר שלך לפני השימוש הראשון ב-PhotoRobot.
הערה: להוראות הרכבה ושימוש ראשוני ב-PhotoRobot MultiCam, עיין ב-התקנת PhotoRobot MultiCam ו-CENTERLESS TABLE.
מדריך טכני למשתמש של SynchroBox
תודה ומזל טוב על רכישת PhotoRobot. PhotoRobot מייצג עשרות שנים של ניסיון מקצועי וחדשנות בצילום אוטומטי. כל מכשיר מספק מערכת אקולוגית של פתרונות מוכנים, עם תכונות המותאמות לצרכים הייחודיים של העסק שלך.
ברוכים הבאים ל-PhotoRobot. השתמשו במידע הטכני הבא כדי להתחיל את המסע שלכם להבנה ולמקסום את ההפקה בסטודיו המופעל על ידי PhotoRobot.
1. PhotoRobot SynchroBox - התיאוריה
ה-PhotoRobot SynchroBox נדרש לסנכרון תריס מצלמה כאשר משתמשים בשתי מצלמות או יותר עם מערכות PhotoRobot. SynchroBox פועל כמרכז מצלמות מרובה מצלמות לסנכרון לכידת פריימים בודדים על ידי מצלמות שונות בדיוק ברגע הנכון. הוא מייצג פתרון לבעיה שמתעוררת בעבודה עם מצלמות עם עיכובים שונים בתריס, והוא תומך בעד 8 מצלמות בסך הכל.
כדי להבין את תיאוריית ה-SynchroBox, קחו לדוגמה את הרצפים של מצב לכידה סטנדרטי לעומת מצב לכידה בסיבוב מהיר עם PhotoRobot.
במצב הלכידה הסטנדרטי, יש את הרצף הבא.
א) הלוח נע לזווית הרצויה.
ב) הלוחית נעצרת.
ג) המצלמה מצלמת את האובייקט.
ד) הלוח מתחיל לזוז לזווית הבאה.
אין צורך בהתאמה בתרחיש הזה.
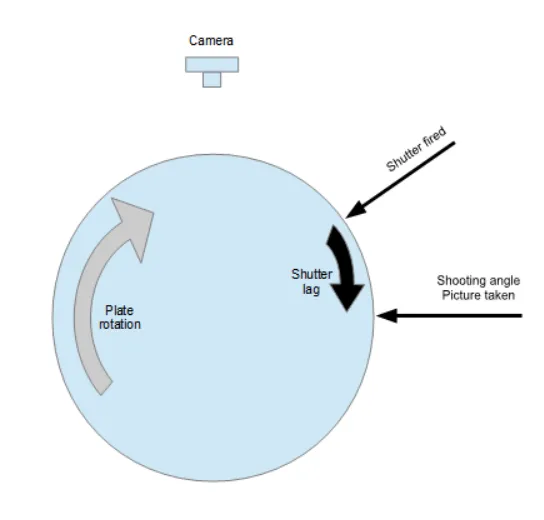
במצב לכידת סיבוב מהיר, הרצף דורש מספר שלבים נוספים.
א) הלוח מתחיל להסתובב במהירות מוגדרת מראש.
ב) יחידת הבקרה מזהה את זווית הלכידה המתקרבת.
ג) יחידת הבקרה יורה את תריס המצלמה באמצעות כבל תריס מראש.
ד) המצלמה מתחילה את תהליך הצילום (תנועת וילון החיישן וכו').
ה) תהליך הצילום דורש כ-50 מילישניות ("השהיית תריס").
ו) הלוח בתנועה רציפה במהלך זמן השהיית התריס.
g) הפלטה מגיעה לזווית הרצויה בדיוק כאשר עיכוב התריס של המצלמה מסתיים, ומצלמת את התמונה.
ח) יחידת הבקרה מזהה שזווית הלכידה הבאה מתקרבת, וחזרה על תהליך הצילום בנוגע לעיכוב התריס.
i) סיבוב הלוחות מסתיים לאחר סיבוב של 360 מעלות, ועוצר כל תנועה.
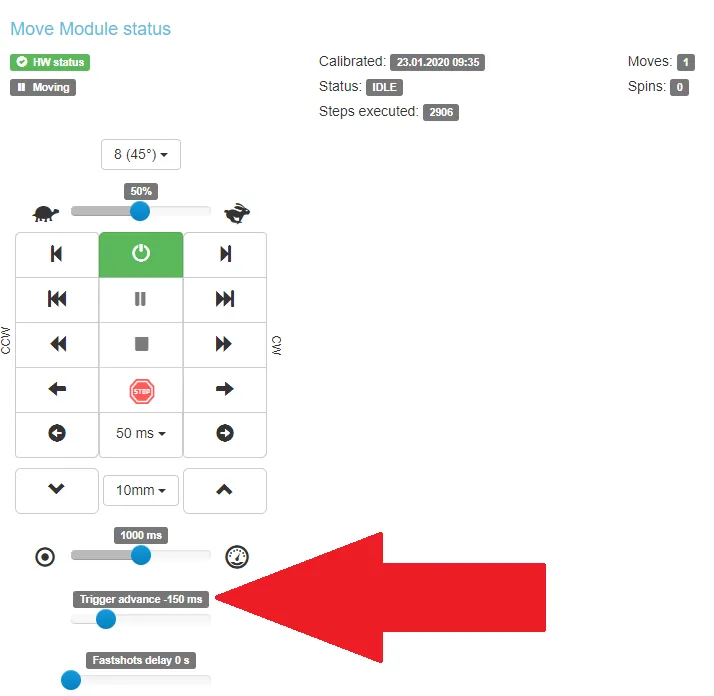
הערה: מכיוון שלכל מצלמה יש השהיית תריס שונה, יש צורך לכוון את התקדמות התריס של יחידת הבקרה עבור כל מצלמה מסוימת. זה אפשרי עבור יחידת הבקרה (דור 6) באמצעות ממשק השירות שלה באמצעות האפשרות "Trigger advance". ערך "Trigger advance" חייב להיות גבוה יותר מהשהיית התריס של המצלמה. לדוגמה, אם השהיית התריס של המצלמה היא 80 מילישניות, אז "התקדמות ההדק" צריכה להיות בערך שווה או גבוהה מ-90 מילישניות.
2. תיאור המכשיר - PhotoRobot SynchroBox
בעיצובו, הסינכרובוקס הוא מכשיר הרכבה במדף שנועד לסנכרון תריסי המצלמה של שתי מצלמות או יותר. הוא הכרחי כאשר מפעילים כל מערכת PhotoRobot באמצעות יותר ממצלמה אחת בו-זמנית. SynchroBox אחד תומך עד 8 מצלמות, ומספק פתרון להתמודדות עם השהיות תריס שונות במצלמות בשימוש.


קחו לדוגמה תרחיש שבו שתי מצלמות ו-SynchroBox רק כמפצל לשתי המצלמות, בלי הגדרה נוספת. במקביל, ערך "התקדמות ההדק" של יחידת הבקרה G6 הוא אפס. התריס מופעל כאשר הפלטה מגיעה לזווית הרצויה.
במקרה זה, שלבי הרצף הם:
א) הלוח מגיע לזווית הרצויה.
ב) יחידת הבקרה יורה את תריס המצלמה באמצעות כבל תריס.
ג) עיכוב התריס בשתי המצלמות נספר לאחור בזמן שהפלטה בתנועה רציפה.
ד) המצלמה הראשונה מצלמת 50 מילישניות אחרי נקודת הצילום הרצויה באמצעות "זווית רצויה + X" מעלות.
ה) המצלמה השנייה מצלמת את התמונה 70 מילישניות לאחר נקודת הצילום הרצויה באמצעות "זווית רצויה + Y" מעלות.
ו) דרגות הערך "Y" גדולות יותר מדרגות ערך "X".
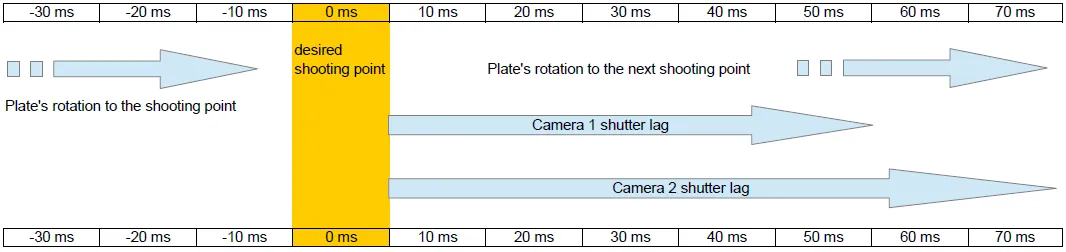
כתוצאה מכך, אין תמונה של הזווית הרצויה. לכן, יש צורך בהתאמה כדי ששתי המצלמות יצילמו את נקודת הצילום הרצויה ברגע הנכון.
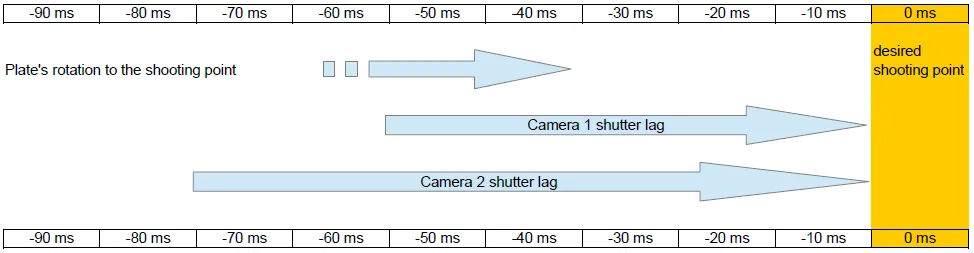
לשם כך, הסינכרובוקס מקבל פולס "שיגור תריס" מיחידת הבקרה G6, ומזהה אוטומטית את אורך הפולס.
בנוסף, ל-SynchroBox יש את ערך השהיית התריס לכל מצלמה מחוברת, שהוזן ידנית בעת ההגדרה.
באמצעות שני הפרמטרים הללו, הסינכרובוקס סופר ומפעיל את התריס של כל מצלמה בהתקדמות המתאימה.
3. איך למדוד עיכוב תריס במצלמה
כדי למדוד עיכוב תריס מצלמה, יש צורך ב-PhotoRobot עם כל פלטה מסתובבת, יחידת הבקרה G6+, ומצלמה שמחוברת באמצעות כבל תריס ליחידת הבקרה.
לאחר מכן, יש לחבר מחשב מקומי עם תוכנת אפליקציית PhotoRobot Controls למצלמה באמצעות כבל USB.
לבסוף, נדרש מנתח בזווית 360 מעלות (להורדה אונליין) כדי להשלים את השלבים הבאים.
א) להניח את המגן על פלטת המכשיר של PhotoRobot, תוך שימוש בכל מצביע הממוקם מחוץ ללוח ומצביע על הקצה.
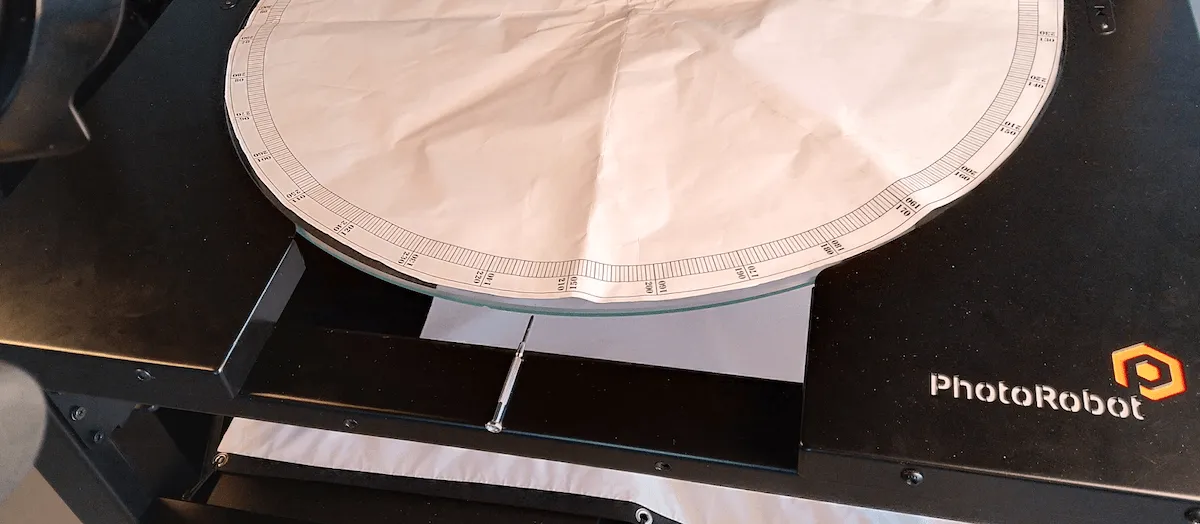
ב) לסובב את הלוח עד שהמצביע מגיע לאפס. הערה: שלב זה אפשרי ביד גם כאשר המנועים החשמליים כבויים.
ג) הפעל תוכנת אפליקציית PhotoRobot Controls, התחבר לחשבון שלך ויצר פריט באמצעות מרחב העבודה תוך התחשבות בהגדרות הניתנות. לאחר מכן, פתח מצב לכידה, ופתח את התיקייה "אחר".
ד) לאחר מכן, בלשונית חדשה בדפדפן שלך, פתח את ממשק השירות של יחידת הבקרה (G6), שמספק שליטה על הלוחית באמצעות כתובת ה-IP שלה.
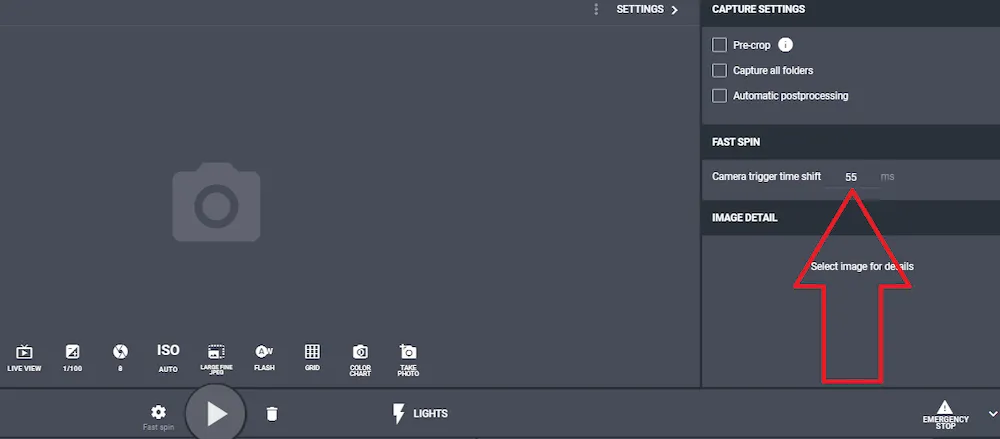
ה) בממשק הגרפי של השירות, הגדר את הרובוט עם הפרמטרים הבאים:
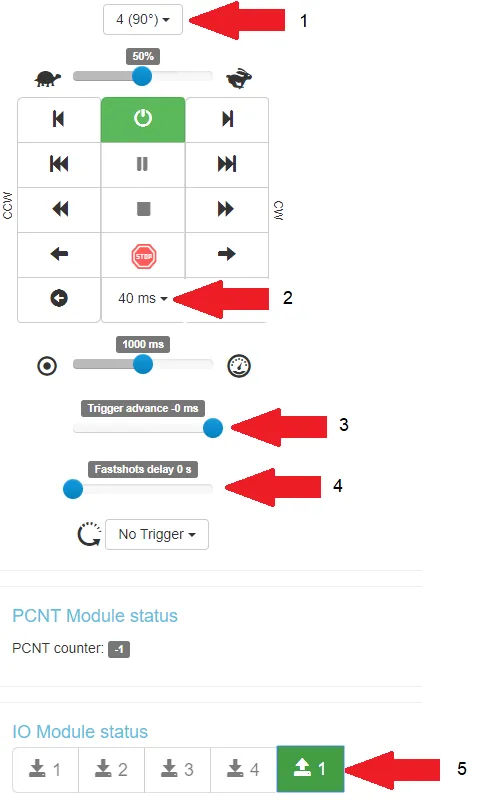
- 1 = 4 תמונות בזווית של 90 מעלות;
- 2 = אורך פולס של 40 מילישניות להפעלת התריס;
- 3 = התקדמות טריגר 0 מילישניות (ללא התקדמות);
- 4 = עיכוב ללא יריות מהירות
- 5 = לחיצה חצי על התריס מופעלת
ו) התחל את הרצף על ידי לחיצה על החץ הימני בפינה הימנית התחתונה של לוח הבקרה:
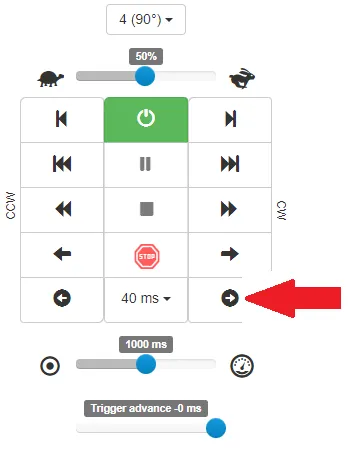
הערה: הרצף מתחיל בזווית של 90 מעלות ומסתיים ב-0 מעלות. במקביל, כל התמונות נלכדות לתיקייה "אחר" באפליקציית הבקרה, כפי שמוגדר קודם.
לדוגמה, עיין בפלטי הדגימה הבאים (עם כיוון סיבוב שמאלה):
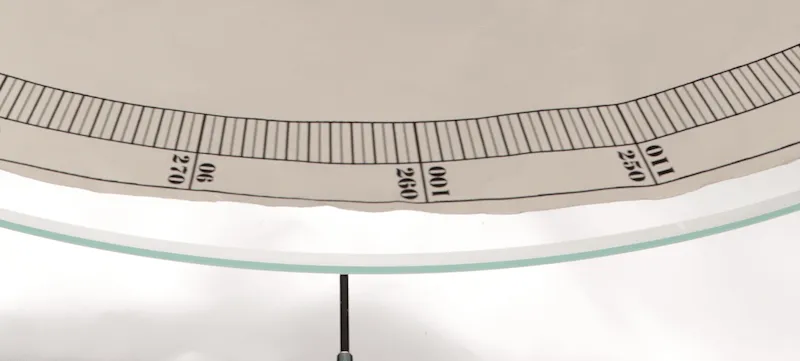
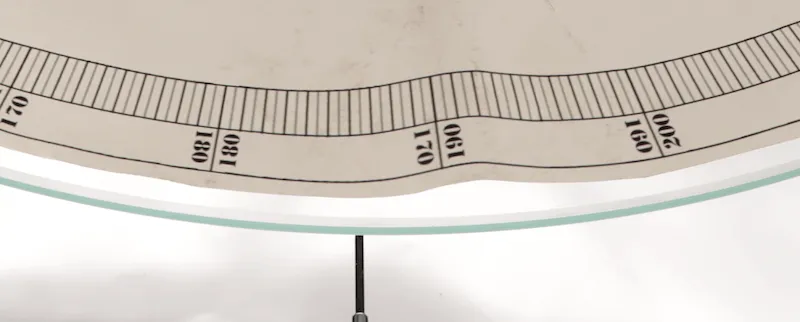
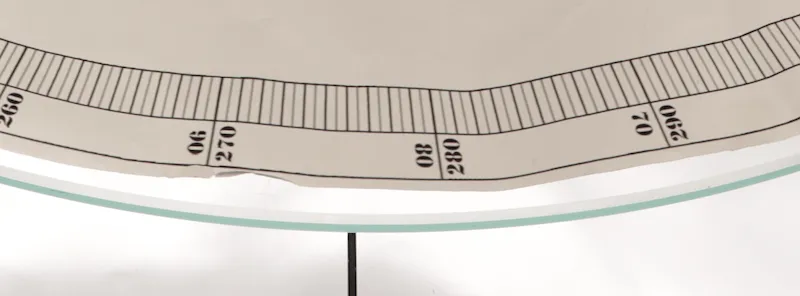
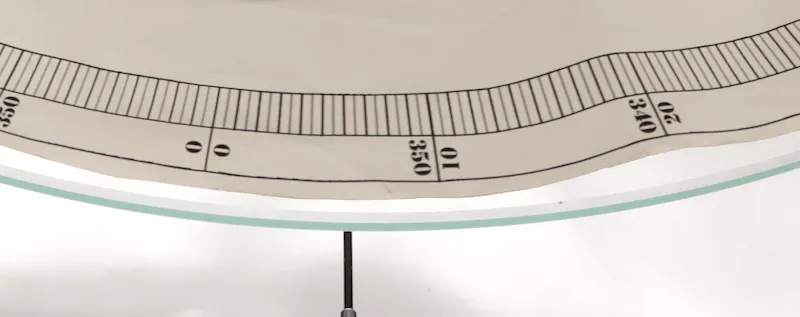
- הערה: בדוגמאות אלו, לכידת התמונה הייתה בערך 6 מעלות לאחר הפעלת ההדק.
ז) לאחר מכן, כדי להמיר 6 מעלות למספר המילישניות (ms) במקרה זה, התחל את הסיבוב הרציף של לוח PhotoRobot באותה מהירות מהשלב הקודם בממשק השירות.
- תפעיל סטופר ותתעד את הזמן ל-10 כדורים.
- במקרה בדיקה זה, הערך המתקבל הוא 61 שניות (61,000 מילישניות).
- זה אומר ש-10 כדורים שווים ל-10 * 360 מעלות (3,600 מעלות).
- יש תנועה של 1 מעלות בזמן שנמשכת 61,000 מילישניות / 3,600 מעלות, כלומר 16.94 מילישניות.
- יש תנועה בזמן של 6 מעלות שנמשכת 16.94 מילישניות * 6, שזה שווה ל-101.64 מילישניות.
- לכן, עיכוב התריס המשוער הוא בערך 102 מילישניות.
ח) לבסוף, יש לחזור על כל השלבים הקודמים כדי לזהות את עיכוב התריס עבור כל מצלמה שונה בשימוש.
4. הגדרת SynchroBox
לצורך הקמת הסינכרובוקס, תנאי מוקדם הוא התקנת יחידת בקרה (G6) ותפעול במלואה. יתרה מזאת, אידיאלית יהיו שתי מצלמות או יותר מאותו יצרן ומאותו דגם, כל אחת עם עיכוב תריס ידוע.
במקרה זה, השתמש בשלבים הבאים כדי להגדיר את SynchroBox.
4.1. חבר את SynchroBox ליחידת הבקרה G6 דרך כבל תריס. הערה: כבל תריס זה מסופק על ידי PhotoRobot כחלק ממשלוח SynchroBox, או תחת מספר החלק KHCAR1R05. כבל התריס מחבר את יציאת יחידת הבקרה G6 "OUT" ליציאת SynchroBox "->IN" (הקטנה יותר, לא השנייה "=>IN").
4.2. חבר את ה-SynchroBox לרשת דרך כבל אתרנט סטנדרטי, תוך שימוש באותו תת-רשת שמחובר ליחידת הבקרה.
4.3. לחבר את כל המצלמות שיפעלו ל-SynchroBox באמצעות כבלי תריס.
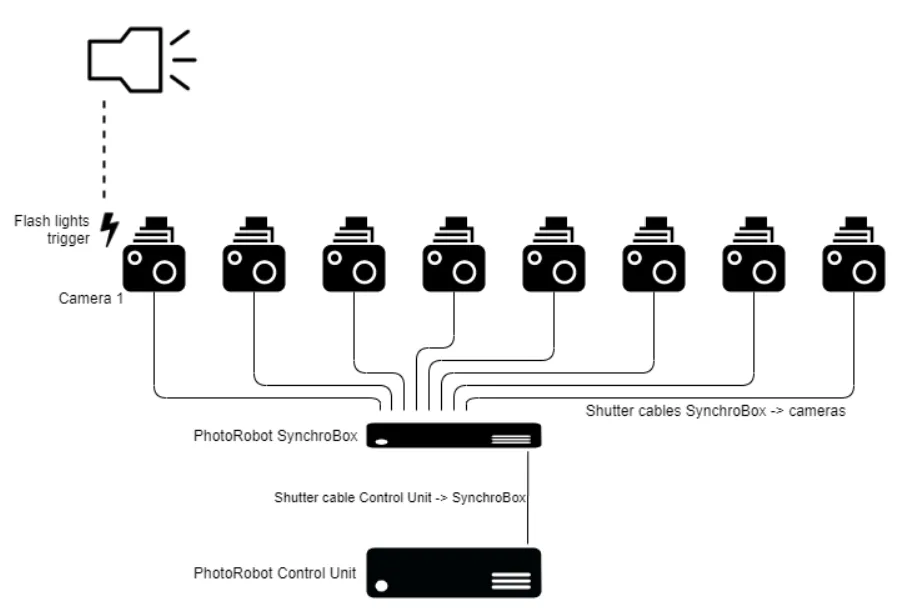
הערה: כבלי התריס של ה-SynchroBox למצלמות מסופקים על ידי PhotoRobot תחת מספרי החלקים KHCARCJ (מחבר Canon Jack 2.5 מ"מ) או KHCARN3 (מחבר Canon N3) בתוספת KHCAR1R05 ההרחבה, או כמערכת כבלים לתריס.

4.4. שים לב שמצלמה 1 (פורט 1 של SynchroBox) מחזיקה ומפעילה את מכשיר הפעלת הפנס. המצלמה הזו חייבת להיות בעלת השהיית התריס הגדולה ביותר.
4.5. הגדר את ערך "Trigger Forward" של יחידת הבקרה (G6) בהתאם להשהיה התריס של המצלמה האיטית ביותר (כפי שתואר קודם לכן בסעיף 1 של מסמך זה). הערה: בעת שימוש באפליקציית PhotoRobot Controls, שימו לב שהערך הזה מותאם / מוחלף על ידי הערך שמוגדר למצב הלכידה - סיבוב מהיר:
4.6. לאחר מכן, ניגש לממשק המשתמש של ה-SynchroBox על ידי הזנת כתובת ה-IP שלו בפורמט URL בדפדפן האינטרנט שלך.
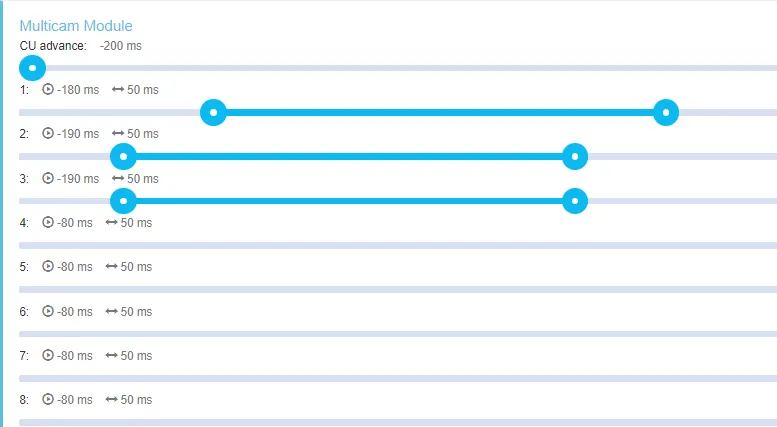
4.7. הגדר את הסליידר הראשון "CU advance" לאותו ערך כמו ביחידת הבקרה, או לערך מקביל ב-PhotoRobot Controls. הערה: שימו לב שאם שני הערכים הללו שונים, הערך ב-PhotoRobot Controls יקבל עדיפות. לאחר מכן, יש 8 סליידרים התואמים ל-8 הפורטים ב-SynchroBox. לכל סליידר יש שני ערכים: ההתקדמות (כפתור שמאל), ואורך הפולס (כפתור ימין). הערך המתקדם שווה להשהייה בתריס של המצלמה המבוקרת (כאשר הערך הממשי הקטן ביותר הוא כ-50 מילישניות). אורך הפולס מתייחס אז למסגרת הזמן שבה כבל התריס של המצלמה שומר על מגע. ערך זה מסופק על ידי יצרן המצלמה, או, אם אינו ידוע, ניתן להגדיר אותו ל-40 - 60 מילישניות.
4.8. הגדר את ערוץ הקלט בממשק השירות של SynchroBox. הערה: כאשר משתמשים בכבלי התריס של PhotoRobot, ההגדרה תמיד תהיה כך.
- בנמל: A = פוקוס, B = טריגר
- פורט 1 - 8: A = טריגר, B = פוקוס
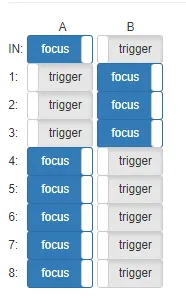
- שימו לב שיש רק מצלמות 1, 2 ו-3 שהוגדרו בדוגמה למעלה.
- מכיוון ש-PhotoRobot מיועד להשתמש בפנסי פלאש, כוון את מהירות התריס של מצלמה 1 ל-1/100 או 1/125.
4.9. לבסוף, להגדיר את ההגדרה הראשונית של כל שאר המצלמות למהירות תריס ארוכה בהרבה, למשל 1/30 - 1/60. זה יעזור להסביר את ההבדלים האפשריים בעיכוב התריס בין המצלמות בשימוש. הזמן הארוך יותר גם יבטיח שכל המצלמות יתפסו את שיא הפלאש מכל הפלאשים. כאשר פועלים נכון, ניתן להתנסות על ידי הפחתת מהירות התריס של שאר המצלמות במידת הצורך.
5. הגדרת SynchroBox מרובה
ה-SynchroBox תומך במספר מקסימלי של 8 מצלמות. אם נדרשים יותר מ-8 מצלמות, ניתן להכפיל את מספר ה-SynchroBoxes בשימוש.

- חבר את יציאת ה-OUT של ה-SynchroBox הראשון ליציאת ה-IN של ה-SynchroBox הבא, באמצעות אותו כבל תריס שמחבר את יחידת הבקרה ל-SynchroBox. כבל התריס הזה מסופק על ידי PhotoRobot כחלק ממשלוח SynchroBox או תחת מספר החלק KHCAR1R05.


סדרת EOS Rebel


סדרת EOS DSLR


סדרת EOS M ללא מראה


סדרת PowerShot


תקריב / כף יד

סדרת Canon EOS Rebel מציעה מצלמות DSLR ידידותיות למתחילים עם איכות תמונה יציבה, פקדים אינטואיטיביים ותכונות רב-תכליתיות. מצלמות אלה, האידיאליות לחובבי צילום, מספקות מיקוד אוטומטי אמין, מסכי מגע בזוויות משתנות והקלטת וידאו באיכות Full HD או 4K.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS DSLR מספקת תמונות באיכות גבוהה, מיקוד אוטומטי מהיר ורב-תכליתיות, מה שהופך אותה לאידיאלית הן לצילום והן להפקת וידיאו.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon EOS M Mirrorless Series משלבת עיצוב קומפקטי עם ביצועים דמויי DSLR. מצלמות אלה, הכוללות עדשות מתחלפות, מיקוד אוטומטי מהיר וחיישני תמונה באיכות גבוהה, נהדרות למטיילים וליוצרי תוכן המחפשים ניידות מבלי להתפשר על איכות התמונה.
חיבור
רזולוציה (MP)
רזולוציה
סדרת Canon PowerShot מציעה מצלמות קומפקטיות וידידותיות למשתמש עבור יורים וחובבים מזדמנים. עם דגמים הנעים בין מצלמות פשוטות לכוון ולצלם זום מתקדמות, הן מספקות נוחות, איכות תמונה יציבה ותכונות כמו ייצוב תמונה ווידאו 4K.
חיבור
רזולוציה (MP)
רזולוציה
מצלמות התקריב וכף היד של Canon מיועדות לצילום ווידאו מפורטים מקרוב. הם קומפקטיים וקלים לשימוש, ומציעים מיקוד מדויק, הדמיה ברזולוציה גבוהה ויכולות מאקרו רב-תכליתיות - מושלם עבור ולוגים, צילומי מוצרים ותקריבים יצירתיים.


